
КОМПЛЕКТ ДОКУМЕНТАЦИИ НА
ОПЫТНО-ЭКСПЕРИМЕНТАЛЬНЫЙ ОБРАЗЕЦ БПЛА "ШАХИД-1"
("БЕСПИЛОТНЫЙ МОТОДЕЛЬТАПЛАН ЩАХИД-1")
и некоторые другие соображения
1. ПРЕАМБУЛА 2. КОМПЛЕКТ ТЕХНИЧЕСКОЙ И ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ НА "ШАХИД-1" 3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ НА "ШАХИД-1" 4. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ, ОБЪЕКТЫ И ПРОТОТИПЫ 5. ОЖИДАЕМЫЕ ИЗМЕНЕНИЯ В СЕРИЙНЫХ ВЕРСИЯХ 6. ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ АББРЕВИАТУР И СОКРАЩЕНИЙ 7. ПИСЬМА В РАЗЛИЧНЫЕ КОНТОРЫ ПО ПОВОДУ И СВЯЗАННЫЕ С ИЗДЕЛИЕМ 8. НАИБОЛЕЕ ИНТЕРЕСНЫЕ И ВАЖНЫЕ ПРОТОТИПЫ И ТЕНДЕНЦИИ И МОИ КОММЕНТАРИИ 9. ФАНТАЗИИ И МЕЧТЫ И ПРОЧИЕ КОММЕРЧЕСКИЕ ФУТУРИИ 10. ШУТОЧКИ 11. ОЧЕРЕДНЫЕ ЗАДАЧИ И ТЕКУЩИЕ ПЛАНЫ Архивный файл hard_schemes.zip с чертежами, рисунками и схемами БПЛА "Шахид-1" . Программа (приложение) splan50.exe в котором нарисованы чертежи,рисунки,схемы и файл Titel.bmp который необходимо сохранить в той же папке, что и splan50.exe, иначе оно не заработает .
1. ПРЕАМБУЛА 1.1. ОБЩЕЕ ТО 1.2. ОСНОВНЫЕ ТТХ 1.3. ОБОСНОВАНИЕ 1. ПРЕАМБУЛА "Шахид-1" представляет собой простой, дешевый, эффективный беспилотный летательный аппарат (БПЛА), выполненный на базе мотодельтаплана (МДП) . "Шахид-1" может выполнять в автоматическом режиме следующие операции : 1) взлёт; 2) полёт; 3) целевые_операции (в полёте); 4) посадка. Себестоимость компонент "Шахид-1" - 600..900 US$ (в эту сумму включены все покупные детали,узлы,агрегаты,материалы и не включены расходы на изготовление) при единичном производстве. Идея создания Шахида такова. 1. Берем дешёвый и простой сверхлегкий летательный аппарат (СЛА) . 2. Устанавливаем на него аппаратуру автоматического управления и навигации . И в результате получаем дешевый и простой беспилотник(по-английски называется "дрон", также используется аббревиатура "БПЛА"). Такой БПЛА экономичнее и эффективнее, чем исходный СЛА, хотя бы потому, что мы выигрываем во взлётном весе летательного аппарата (поскольку масса летчика почти равна массе СЛА), и выигрываем по затратам на эксплуатацию, ведь автоматике не нужно платить зарплату. Как видно, идея очень проста. Для того, чтобы разрабатываемый дрон(Шахид) мог выполнять транспортные задачи нужные очень многим потребителям, Шахид должен был перевозить примерно 100 килограмм полезного груза на расстояние примерно 200 километров. При выборе типа летательного аппарата, теоретически, есть четыре варианта : 1) моторный параплан - мотопараглайдер; 2) мотодельтаплан(далее по тексту МДП); 3) самолёт(далее по тексту, временами, его синоним - аэроплан); 4) экзотика (вертолёт,автожир,дирижабль,экраноплан,конвертоплан) . Экзотика отметается сразу, т.к. она стоит очень дорого, узкопрофильна в применении и плохо подходит для единичного(кустарного) производства. Наиболее подходящим вариантом является мотодельтаплан (МДП). Вот преимущества МДП перед конкурентами : 1. По стоимости и сложности он почти такой же как параглайдер, и при этом в 3...4 раза дешевле самолёта. 2. По расходу топлива он в разы экономичнее самолета, и примерно одинаков с параглайдером. 3. По остальным основным летно-техническим характеристикам (ЛТХ) он в разы превосходит параглайдер и при этом, его ЛТХ подходят для многих применений, где применяются лёгкие самолеты. 4. Динамика и аэродинамика МДП таковы, что можно, при изготовлении автопилота для него, не использовать активную стабилизацию. Известно, что грамотно спроектированный и качественно изготовленный МДП обладает солидным запасом статической устойчивости - - и продольной, и боковой (поперечной и путевой). При переоборудовании МДП в дрон, вся аппаратура, дополнительно устанавливаемая на борту Шахида, состоит из следующих основных компонент : 1. Бортовой управляющей электронной цифровой вычислительной машины (УЭВМ). 2. GPS-применика. 3. Электромагнитов. 4. Инвертора напряжения (=12) -> (~220). 5. Модуля драйверов электромагнитов. Шахид является полностью автоматической машиной (роботом). Шахид выполняет те или иные действия в соответствии с управляющей программой, которая записана в память бортовой управляющей электронной цифровой вычислительной машины (УЭВМ). Управляюшая программа называется циклограммой спецоперации. В дальнейшем, если не указывается какая конкретно циклограмма, то подразумевается циклограмма спецоперации. Таким образом, Шахид выполняет те или иные действия в соответствии с циклограммой спецоперации. Циклограмма спецоперации состоит из : 1) программной траектории; 2) циклограммы целевых сервоустройств. Циклограмма целевых сервоустройств управляет целевыми сервоустройствами Шахида. Все сервоустройства, входящие в Шахид-1, подразделяются на сервоустройства бортовые и сервоустройства целевые. Под любыми сервоустройствами подразумеваются исполнительные устройства, выполняющие те или иные действия; например устройство, обеспечивающие поворот руля направления, или другой пример - устройство, выполняющее распыление гербицидов. Сервоустройство состоит из его сервопривода и рабочего органа этого сервоустройства. Например, сервоустройство руля направления состоит из электромагнита, кривошипно-шатунного механизма(КШМ) и самого руля напрвления. Электромагнит и КШМ составляют сервопривод руля направления. Руль направления является рабочим органом сервоустройства руля направления. Бортовые сервоустройства обеспечивают автоматический полёт по программной траектории. Целевые сервоустройства обеспечивают исполнение целевых операций в соответствии с циклограммой спецопераций. Циклограмма спецопераций, как помним, хранится в памяти УЭВМ. Целевые сервоустройства могут быть практически любыми (на опытно-экспериментальном варианте изделия они не смонтированы). В предлагаемой документации нет абсолютно строгого соответствия ЕСКД,ЕСТД и другим проектно-производственным нормативам(ГОСТам). В дальнейших описаниях часто используются синонимы при указании на те или иные объекты, также часто используются термины и аббревиатуры принятые в разных отраслях. Пояснения и расшифровка аббревиатур и терминов указаны в разделе "6. ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ АББРЕВИАТУР И СОКРАЩЕНИЙ" В дальнейших описаниях, если не указывается какая именно реализация подразумевается, то подразумевается, что речь идет об опытно-экспериментальной реализации(версии). в начало раздела 1.1. ОБЩЕЕ ТО Итак, "Шахид-1" представляет собой комплексное изделие состоящее из МДП и установленной на нем вычислительно-управляющей техники, радиоэлектронной, электронной, электро, электромеханической аппаратуры. "Шахид-1" может автоматически (то есть без участия человека): 1) взлетать, лететь по заданной (программной) траектории; 2) выполнять целевые операции в заранее определенных участках тректории и временных интервалах; 3) садиться. В серийной версии изделия, аппаратура будет дополнена системой дистанционного радиокомандного дискретного управления(СДУ). Описание СДУ см. в разделе 5. ОЖИДАЕМЫЕ ИЗМЕНЕНИЯ В СЕРИЙНЫХ ВЕРСИЯХ Аппаратура автоматического вычисления и управления(САУ и навигационная) физически выполнена на основе : 1. Бытовой(конторской) микроЭВМ. 2. Приемника системы глобальной ИСЗ-радионавигации GPS (еще называют GPS-приемником) с интерфейсами стэков протоколов стандартов: BlueTooth(либо USB, либо RS-232C), и NMEA-0183 (при этом: BlueTooth(USB,RS-232C) - уровней физического, канального, сетевого(если USB или BlueTooth),транспортного и сеансового, а NMEA - прикладного(условно) и приложения, см. модель OSI). МДП, выполнен по типовой конструктивно-механической компоновке (если так можно выразиться) с использованием очень дешёвых и широкодоступных материалов (дерево, пластмассы,клеи,ткани), его мотор взят от мотоцикла "ИЖ-Планета", а может быть также от микролитражки или мотолодки. Выходные силовые напряжения для целевых сервоприводов двух параметров (запараллеленые) : постоянные(в смысле непеременные) равные +12 [В], максимально допустимый ток в нагрузке для них(то есть в целевых сервоприводах) равен 2 [А] ; и ~220 [В] - переменное частотой 50 [Гц] с максимально допустимым действующим током в нагрузке до 5 [А] . САУ изделия "Шахид-1" представляет собой САУ дискретного,адаптивного типа с числом уровней квантования в контурах управления : 3(в канале курсового руля), 2(в канале управления тангажа(или более точно - угла атаки)), 4(в канале газа), 2(в канале зажигания). Дискретизация производится также и по времени, шаг дискретизации по времени равен 0,4 секундам. Звеном в контуре(цепи) обратной связи является соответственно формализованный GPS-приемник. Шаги дискретизации на выходе звена в контуре ОС (GPS-приемника) : 1 метр - для горизонтальных линейных координат, 0.1 градуса - для горизонтальной угловой координаты (курс относительно азимутального направления), 1 метр - для вертикальной координаты(высота над уровнем моря), 1 м/сек - для путевой скорости. Шаги квантования для цепи ОС определены на основании : 1) экспериментальных измерений GPS-приемником BT-338 (весьма морально немолодая модель); 2) результатов полученных другими разработчиками; и поэтому соответствуют точности навигационных измерений любым современным GPS-приемником и большинству систем обработки навигационной информации. Типичные значения среднеквадратичных отклонений(СКВО) результатов GPS-измерений(во многих публикациях): ------------------------------------ GPS позиция 3 [м] GPS скорость 2 [м/сек] GPS ориентация 2 [град] ------------------------------------ САУ Шахида относится (по функциональному назначению) к автопилотным, и разумеется реализована программно (в смысле её вычислительный блок). САУ, навигационная подсистема и другие подсистемы вместе составляют замкнутую (т.е. автоматическую) систему "Пилотажно Навигационный Комплекс"(ПНК). ПНК обеспечивает реализацию : 1) функции составления_и_вычисления_траектории_полета_и_целевых_операций(живой офицер-штабист); 2) функции САУ(непосредственно пилотирование); 3) функции навигации(заменяет живого штурмана); 4) функции стрельбы(заменяет живого борт-стрелка); 5) функции бомбосбрасывания или бомбометания(заменяет живого бомбардира); 6) функций технологических(заменяет живого борт-оператора). Избежание самовозбуждения(а значит достижения устойчивости) САУ достигается использованием корректирующих звеньев (естественно виртуальных) и подстройкой не только параметров всех звеньев, но и подстройкой структуры всей САУ (в том числе к внешним воздействиям(ветрам), и таким образом САУ является по настоящему адаптивной). Допускается подключение целевых сервоприводов количеством до 8 штук. Срабатывание целевых сервоприводов, и соответствующих им целевых сервоустройств будет контролироваться однобитными сигналами обратной связи от этих целевых сервоприводов(и соответствующих им целевых сервоустройств), эти сигналы должны быть ТТЛ-уровня. В документации на "Щахид-1" пока не прилагаются ни целевые сервоприводы, ни целевые сервоустройства, ни датчики обратной связи для бортовых и целевых сервоустройств. 1.2. ОСНОВНЫЕ ТТХ ДЛЯ МИНИМАЛЬНОЙ(ОПЫТНО-ЭКСПЕРИМЕНТАЛЬНОЙ) КОНФИГУРАЦИИ ЛТХ мотодельтаплана (ориентировочные, будут уточняться) Длина мототележки ----------------------- 2200 [мм] Высота ---------------------------------- 2300 [мм] Колея ----------------------------------- 1300 [мм] Площадь крыла --------------------------- 16 [кв.м] Аэродинамическое качество(макс.) -------- 7 Взлётный вес ---------------------------- 130-180 [кг] Масса полезной нагрузки ----------------- 50-100 [кг] Масса крыла ----------------------------- 36 [кг] Масса мототележки ----------------------- 25-50 [кг] Запас горючего -------------------------- 5-20 [л] Расход горючего в час ------------------- 2-5 [л] Скорость отрыва ------------------------- 42-45 [км/час] Крейсерская ----------------------------- 50-55 [км/час] Максимальная ---------------------------- 75 [км/час] Минимальная ----------------------------- 40 [км/час] Эксплоатационная перегрузка ------------- +6 -3 Мощность мотора ------------------------- 16-25 [л.с.] Статическая тяга ------------------------ 500-750 [Ньютон] Ограничение по ветру: встречный ------------------------------- 10 [м/сек] боковой --------------------------------- 7 [м/сек] Разбег ---------------------------------- 25-70 [м] Скороподъёмность ------------------------ 2-4 [м/сек] Дальность полёта ------------------------ до 250 [км] Теоретический потолок ------------------- 3200 [м] Скорость снижения с выкл. мотором ------- 1,2 [м/сек] ТТХ аппаратуры автоматического управления Масса -------------------------------------------- не более 10 кг(с сервоприводами) Потребляемая мощность ---------------------------- не более 300 Вт(с сервоприводами) Максимальное отклонение от программной траектории по горизонтали --------------------- не более 7 м(при штиле с вероят.=70%) Максимальное отклонение от траектории по высоте -- не более 3 м(при штиле с вероят.=70%) ТТХ целевой электроаппаратуры (целевых сервоприводов) Масса ---------------------- Потребляемая мощность ------ Выходное напряжение -------- +12 [В] , ~220 [В] Предельно допустимые выходные электрические параметры: Ток ----- 2 [А] (по +12 [В]) , 5 [A] (по ~220 [В]) Общие ТТХ Максимально допустимая температура при эксплоатации ----------------- + 35 град. Цельсия Минимально допустимая температура при эксплоатации ------------------ - 10 град. Цельсия Максимально допустимая относительная влажность при эксплоатации ----- 95 % в начало раздела 1.3. ОБОСНОВАНИЕ Почему в качестве планера выбран дельтаплан, а не параплан или не классик ? Потому, что дельтаплан является оптимальным решением проблемы при учете таких частично противоречивых условий и требований, как : дешевизна_комлектующих_и_материалов, единичность_производства,достаточная_точность,простота_и_дешевизна_производства,и в целом технологичность_при_единичном_производстве,высокая_рентабельность_эксплоатации, многофункциональность,ремонтопригодность,простота_и_быстрота_монтажа_и_демонтажа, малозаметность_в_различных_физических_полях,скрытность_применения,мимикрия_под_другие_объекты, лёгкость_транспортировки,высокие_ЛТХ и т.д.; при этом, разумеется, строгая оптимизация при выборе варианта реализации объекта проектирования мною не проводилась, и соответственно строгого определения весовых коэффициентов входящих в целевую функцию оптимизации не делалось, что допустимо, т.к. "Шахид-1" предназначен для единичного производства(но может изготавливаться серийно с высокой рентабельностью при наличии соответствующих приспособлений, оснастки, инструментов, оборудования и персонала). Почему аппаратура автоматического управления и навигации выполнена на основе бытовой(конторской)микроЭВМ, а не на промышленном контроллере(типа PLC from "SIMENS", "FATEK", "TOSHIBA", etc.), или не на БМК(ПЛМ,ПЛИС), или не на одноплатном спецконтроллере или не на каком-нибудь military_computer_portative ? Потому, что бытовая(конторская) микроЭВМ является оптимальным решением проблемы при учете таких частично противоречивых условий и требований, как : дешевизна_комлектующих_и_материалов, единичность_производства,точность,высокая_рентабельность_эксплоатации,многофункциональность, ремонтопригодность,простота_монтажа_и_демонтажа. В перспективе, САУ и навигация будут реализованы в УЭВМ на базе одноплатного спецконтроллера на базе какой-нибудь DSP однокристальной ЭВМ (ADSP,TMS,Motorola-DSP или ARM - что-нибудь из этого списка), которые пока хлопотно приобретать, что позволит применять "Шахид-1" в более широком диапазоне климатических и механических условий(температура,влажность,вибрации, перегрузки,удары) и атмосферных давлений, и при высоких интенсивностях и уровнях ионизирующих излучений (например при операциях по доставке объектов с высоким уровнем и высокой интенсивностью ионизирующих излучений ими испускаемых, например можно доставлять ампулы с медицинскими радиоизотопами для неотложной радиологии или доставлять боеприпас типа радиологической бомбы(при военной или диверсионно-террористической версии изделия). Разумеется, что и лэптоп, и DSP(с дооснащением большой ЭСППЗУ) обладают гигантской вычислительной аппаратной избыточностью, поэтому не будет никаких проблем с расширением системы для решения почти любых целевых задач. Почему не применяется активная стабилизация ориентации "Щахид-1" при помощи типовой системы на основе вычислителя и инерциальных измерителей(гироскопов, акселерометров) ? Потому, что это заметно удорожит и усложнит изготовление аппаратуры автоматического управления, но при этом не приведет к заметному повышению динамических и точностных параметров системы в целом, поскольку мотодельтаплан, как объект управления, обладает немаленькой постоянной времени (попросту говоря, функционально, это не истребитель и не спортивнопилотажный самолет), и при этом, разумеется обладает достаточным запасом статической устойчивости (и продольной, и боковой). Замечу, что реализованные на практике беспилотные параглайдеры (мотопарапланы) обладают достаточной траекторной точностью, и в них также не применяется активная стабилизация. Почему применяются электромагнитные бортовые сервоприводы (и соответственно двух-трех-позиционные(в смысле активного положения) аэродинамические рули и органы управления аэродинамическими поверхностями), а не применяются бортовые сервоприводы с непрерывным законом управления (так называемые рулевые машины(сервомоторы), состоящие из электродвигателя постоянного тока, редуктора, датчика угла поворота и контроллера) ? Потому, что это заметно удорожит и усложнит изготовление аппаратуры автоматического управления, но при этом не приведет к заметному повышению динамических и точностных параметров системы в целом, поскольку (как указано ранее) МДП, как объект управления, обладает немаленькой постоянной времени переходного процесса (такова аэродинамика и динамика всякого мотопланера), а значит его программная траектория не может изобиловать дугами с маленькими радиусами и короткими, и острыми зигзагами по тем же причинам, что и изложены ранее, и значит точность удержания его на программной траектории будет определяться, в немалой мере, хорошей его механической настройкой и демпфирующими силами и моментами. Известно, что импульсные(как правило с фиксированной длительностью импульса) двухпозиционные рулевые электромагниты и двухпозиционные рули находят широкое применение в современных противотанковых управляемых реактивных снарядах(ПТУРС) и в современных противолодочных самонаводящихся торпедах, что означает в свою очередь - приемлемая точность при инерционной цели (уязвимое место современного танка - не более одного квадратного метра). Также известно, что электромагнитный привод применяется для привода рулей-интерцепторов(щитков) современных сверхманевренных истребителей(например "Беркут"), причем, привод управляется его САУ в режиме активной стабилизации (например при удержании ориентации(то есть по тангажу,крену,рысканию) ) при очень малой воздушной скорости и закритических углах атаки - обычный самолет давно бы уже провалился в штопор), так что электромагнитный привод весьма и весьма точен и удобен для грамотно спроектированной САУ летательного аппарата. В будущем, вероятно, в контуре управления тягой будет применяться шаговый электромотор, что позволительно, ввиду малости усилий при перемещении дросселя и великости длительностей (с учетом небольшой приёмистости тяговых моторов мотопланеров). в начало раздела
в начало страницы в начало страницы
2. КОМПЛЕКТ ТЕХНИЧЕСКОЙ И ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ НА "ШАХИД-1" 2.1. ПАСПОРТ 2.2. ТЕХНИЧЕСКОЕ ОПИСАНИЕ 2.3. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ 2.4. КОНСТРУКТИВНО-МЕХАНИЧЕСКИЕ ЧЕРТЕЖИ И ЭСКИЗЫ 2.5 ПРОГРАММНОТЕХНИЧЕСКАЯ ДОКУМЕНТАЦИЯ 2.6 ТЕХНОЛОГИЧЕСКАЯ ДОКУМЕНТАЦИЯ 2.7 ИНСТРУКЦИЯ ПО ЭКСПЛОАТАЦИИ 2.8 СИСТЕМОТЕХНИЧЕСКАЯ ДОКУМЕНТАЦИЯ 2.1 ПАСПОРТ [Формируется] 2.2. ТЕХНИЧЕСКОЕ ОПИСАНИЕ 2.2.1. ВВЕДЕНИЕ Шахид-1 реализован, в основном, по классической для ДП(МДП) аэродинамической схеме. Добавлен носовой курсовой руль(еще его называют рулем направления). Курсовой руль расположен ниже уровня крыла. Как известно, есть три основных компоновочных аэродинамических схем, используемых при конструировании воздухоплавательных машин плывущих(т.е. не падающих от действия силы тяготения) в воздухе за счет подъемной силы(она противонаправлена силе гравитации) от их крыльев(несущих аэродинамических поверхностей): 1) нормальная самолетная 2) утка 3) безхвостка. Дельтапланы выполняются по третьей схеме. Шахид-1, таким образом, является гибридом второй и третьей схем. Как правило, мотогондола подвешивается на двухстепенном шарнире(этот шарнир по тангажу и крену), в моем изделии шарнир одностепенной, его угол - по углу тангажа. Обычно, МДП управляются при помощи балансирного принципа (наверно, это удобно для летчика и сильно упрощает и удешевляет механизмы управления органами управления), при котором, при помощи поворота мотогондолы(мототележки) относительно крыла изменяются : 1) координаты центра масс всего МДП(в системе координат связанной с МДП); 2) направление вектора силы тяги пропеллера(в системе координат связанной с МДП); 3) точка приложения вектора силы тяги пропеллера(в системе координат связанной с МДП); в результате возникают управляющие моменты сил, которые изменяют : 1) углы ориентации крыла относительно вектора относительной скорости воздушной среды(атаки,скольжения) - для т.н. скоростной системы координат; 2) углы ориентации всей машины относительно земной(неподвижной) системы координат(тангажа, крена,рыскания - для т.н. связанной системы координат). Также, летчик управляет газом, изменяя силу тяги (модуль вектора силы тяги). В результате, изменяются векторы описывающие МДП как материальную точку (эта точка расположена в центре масс МДП) : 1) радиус-вектор мгновенного положения центра масс МДП относительно земной системы координат; 2) вектор мгновенной скорости центра масс МДП относительно земной системы координат; 3) такой же вектор для ускорения; и изменяет векторы описывающие ориентацию МДП относительно его центра масс(как твердого тела, имеющего три размерности) в пространстве: 1) полный аксиальный мгновенный вектор угла, 2) полный аксиальный вектор мгновенной угловой скорости, и 3) полный аксиальный вектор мгновенного углового ускорения. Для бесчеловечного руления удобнее управлять по углу рыскания при помощи аэродинамических сил напрямую (далее для удобства назову угол рыскания - курсом). Кроме того, применение метода компоновки по схеме "утка" позволяет развить большой суммарный управляющий момент по курсу, так как курсовой руль вынесён вперед => сформированный управляющий момент по курсу не гасится реактивным демпфирующим курсовым моментом(который возникает в нормальной самолётной схеме от хвостового киля) => можно использовать сравнительно маломощные сервоэлектромагниты . Руление по углу тангажа (или по связанному с ним углу атаки) в "Щахид-1" такое же как и у большинства ДП(МДП) - поворотом в шарнире подвески мотогондолы . Подробное описание МДП в конструкторско-механическом аспекте достаточно подробно изложено в источниках, которые указаны в разделе "4. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ, ОБЪЕКТЫ И ПРОТОТИПЫ", кроме того, чуть ниже, в разделе "2.2.2. ОПИСАНИЕ МДП" изложено описание моего МДП. Эскизы некоторых чертежей моего МДП(в смысле спроектирован мною и проверен) в файлах, которые в архивных файлах "hard_schemes.zip", "pictures_for_AMDP-1.zip" . Принцип руления по курсу при помощи носового курсового руля, а не при помощи изменения крена был реализован ранее в одном из МДП. Этот метод несколько упрощает алгоритм "виртуального_пилота" и повышает динамические, и точностные параметры всей САУ(ведь у схемы "утка" выше управляемость по курсу и ниже устойчивость по курсу). Для изготовления МДП, мне осталось лишь сконструировать и изготовить узлы(что я и сделал) : 1. Курсового руля(с его креплением), который(напомню) располагается снизу от носовой части крыла, его кинематическая схема и эскиз в разделе "2.4 КИНЕМАТИЧЕСКИЕ СХЕМЫ И КОНСТРУКТИВНО-МЕХАНИЧЕСКИЕ ЧЕРТЕЖИ, ЭСКИЗЫ И СПЕЦИФИКАЦИИ" . 2. Привода поворота шарнира подвески мотогондолы, его кинематическая схема и эскиз там же . 3. Привода перемещения тросика(который тянет сектор-рычаг дросселя-задвижки газа) - все там же. Если вы(потребитель) желаете иметь низкую ЭПР машины, то используйте материалы с как можно большим электрическим сопротивлением(попросту говоря, никаких металлов или их сплавов, а вместо них - всякие диэлектрики - дерево,пластмассы,ткани). Такие методы снижения ЭПР неплохо помогают в дециметровом и сантиметровом диапазонах несущих РЛС обнаружения, РЛС целеуказания (сопровождения цели), но в миллиметровом диапазоне сигналов несущих этого уже недостаточно(там приходится бороться с поверхностными вихревыми токами при помощи нанесения покрытий содержащих материалы со свойствами ферромагнетиков), но это не страшно, т.к. РЛС с несущими миллиметрового диапазона пока очень мало и они стоят очень дорого(там требуется применять дорогую арсенид-галлиевую элементную базу, причем на высоких мощностях => очень трудно обеспечить теплоотвод, а также требуется применять довольно сложные системы искусственного интеллекта - их подкласс - системы распознавания образов). Так что, могу порекомендовать: вместо стальных тросов - нейлоновые канаты, вместо дюралевых труб - углепластиковые либо стеклопластиковые (что дорого), или клееная из деревяных деталей балка(что существенно дешевле). Эскиз узла такой клееной деревяной балки приведен все в том же разделе (2.4) . Если вы желаете иметь низкий уровень ИК-заметности, то вам нужно : 1. Установить теплопоглощающие экраны (например из пенопласта) снизу, сверху и с боков мотора . 2. Газоотводную трубу желательно сделать подлинее и поместить ее выходную часть во внешний контур(вложенные трубы), с тем, чтобы внешняя труба была отделена воздушным зазором от внутренней, и таким образом температура внешней трубы была бы во много раз меньше температуры горячей внутренней трубы, а также в более длинной внешней трубе(выходной срез внешней трубы должен располагаться позади выходного среза внутренней трубы) происходило смешивание горячего выхлопа из внутренней трубы с холодным внешним воздушным потоком, и тем самым результирующий выхлоп на срезе внешней трубы был бы как можно менее горячим. Для снижения уровня акустических полей применяйте обычные методы, применяемые в автомобильной технике(глушители, амортизаторы, тщательная балансировка приводов, точность изготовления пропеллера). Если будет востребована потребность в очень низкой акустичекой заметности, то будет доработан маршевый привод винтомоторного агрегата. Такая потребность может возникнуть, например, у потребителей, использующих Шахиды для диверсионно-террористических операций. Будет установлен стартерный литий-полимерный аккумулятор(либо топливный элемент на жидких углеводородах), с большими ампер-часами(энергоемкостью) и достаточным номинальным рабочим током. И будет установлен более мощный стартерный электромотор, с номинальной механической мощностью равной средней мощности маршевого ДВС (будет что-то подобное приводу гибридного автомобиля достаточно небольшого типоразмера). Аккумулятор должен обеспечить выходную электрическую мощность для привода стартерного электромотора, а от него (через обходную трансмиссионную цепь, включающую электромагнитную муфту, например фрикционную) пропеллера с номинальной средней угловой скоростью(частотой вращения) в течении 10...20 минут. Со временем, будут приведены : кинематические схемы, параметры литий-полимерных стартерных аккумуляторов, параметры стартерных электромоторов, параметры электромагнитных муфт сцепления (для обхода маршевого ДВС). в начало раздела 2.2.2. ОПИСАНИЕ МДП Описание одноместного пилотируемого мотодельтаплана (МДП) "Поиск-04" приведено в источнике, адрес которого указан в "4. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ, ОБЪЕКТЫ И ПРОТОТИПЫ" . Здесь изложено описание моего МДП. МДП состоит из ДП и мотогондолы(мототележки), соединенных одностепеным шарниром. Еще говорят, что мотогондола подвешена к крылу ДП. ДП, по-сути, состоит из крыла. Крыло состоит из каркаса и обшивки. Каркас выполнен по балочно-расчалочной схеме. Основные элементы каркаса: две боковые балки, одна килевая(осевая) балка, мачта, поперечная балка, тросовые растяжки, узел носовой, узлы боковые, узел центральный(в нем шарнир). Обычно каркас выполняют трубчатым, поэтому далее подразумевается, что балка <-> труба. В обшивке есть карманы, в которые вставляются профилирующие элементами - латы(аналог нервюры) и узлы(элементы) динамического ограничения минимальных углов атаки(ДОМУА). Обычно в трубы вставляются бужи - для усиления в местах с наибольшими изгибающими моментами. Трубы имеют технологические и эксплуатационные разъемы, первые предназначены для усиления в районе узлов. В открытые концы труб вставляются пластмассовые заглушки, а в местах соединения с узлами уста- новлены пластмассовые радиусные шайбы. Боковые и килевая трубы шарнирно соединены в носовом узле, который представляет собой обте- катель и конструктивно состоит из П-образной стальной пластины со швеллером и серьгой. Центральный узел собран из двух швеллеров. В верхней его части крепится мачта, поддерживаю- щая тросы; в нижней устанавливается мотогондола. Боковой узел каркаса - выполнен в виде вилки. Тросовая система, скрепляющая каркас, состоит из верхних и нижних стальных тросов обычно диаметром 2,5 мм , заделанных через коуши в серьги, скобы и карабин. Верхние расчалки соединя- ют носовой и боковые узлы, и узел на килевой трубе через топ мачты. Тросы вблизи топа имеют ограничители перемещения. Между носовым узлом и тросом, как и между левым боковым и тросом, ус- тановлены зубчатые регулировочные элементы натяжения продольных и поперечных тросов. Нижние тросы крепятся скобами к раме мотогондолы. Для крепежа в основных узлах дельтаплана используются болты М8. Неразъемные соединения выполнены с использованием самоконтрящихся гаек, разъемные - с контровкой шплинтами. Узлы ДОМУА МДП включают три основных элемента. Главный из них - килевая профилированная лата, установленная между центральным и носовым узлом. Она обеспечивает постоянство формы носовой части крыла в килевом сечении. Жесткие корневые латы обшивки, концы которых соединены тросами с мачтой, придают профиль обратной кривизны в этом сечении крыла на малых углах атаки. Также способствуют устойчивости МДП, - динамические концевые ограничители провиса обшивки, ограничивающие уменьшение отрицательной крутки на малых углах атаки. Обшивка дельтаплана состоит из тканевого паруса, боковых и килевого карманов. Формообразование поверхности крыла в полете, аэродинамическая нагрузка на несущую поверхность, деформация каркаса - все это реализовано в раскрое обшивки по передней кромке, по килевому сечению и по сечению боковой латы. Материал - парусная лавсановая ткань, допускается двойная ткань типа АЗТ(так называемый тентовый шелк). Для обеспечения формообразования крыла в обшивке по стыку полотнищ выполнены латкарманы, в которые вставляются латы. Центральные из них обычно ориентированы по потоку, а боковые - наискось. Сами латы обычно трубчатые, диаметром 16..20 мм , толщина стенки труб 1,5..2 мм, из пластмассы(например из полиэтилена высокой плотности). Носовая часть тех из них, что ориентированы по потоку, имеет постоянный по размаху радиус 400..500 мм и прямолинейную хвостовую часть. Парус сшивается из отдельных полотнищ, состыкованных внахлест. Припуски на подгиб по передней кромке боковых карманов 11-12 мм , в остальных местах не меньше 10 мм. Все элементы паруса сострачиваются швом типа зигзаг шириной 5 мм с использованием качественных и достаточно толстых ниток. Начало и конец каждого шва закреплены тройной прострочкой на длине 20..30 мм. Наиболее нагруженные места, а также вырезы на парусе усиливаются: окантовываются прочной лентой или накладками(боутами) и прошиваются. Носовая часть паруса пришпиливается к боковым трубам валиками с булавками через металлические пистоны-люверсы, заделанные в ткань. Люверс есть и в килевом сечении паруса - для карабина, зацепленного за трос поддержки задней части обшивки. Концы обоих боковых и килевого карманов снабжаются лентами крепления к боковым и килевой трубам. К лентам вручную пришиваются металлические серьги, каждая с двумя отверстиями под болты. В стыках полотнищ паруса устроены глухие спереди латкарманы, входные отверстия которых усилены боутами и имеют пистоны для крепления упругих шнуров - фиксаторов лат. Каждый динамический концевой ограничитель провиса обшивки(см. выше ДОМУА) представляет собой пластмассовую(но жесткую) или дюралевую трубку диаметром 20..30 мм и длиной около метра - представляет собой двуплечий рычаг, шарнирно закрепленный в кронштейне(швеллере) под боковой трубой. Конец заднего, более длинного плеча заглушен и покоится в петле под внутренней скошенной латой. Переднее же, короткое плечо, выходя за ось шарнира, слегка выглядывает из-под передней кромки крыла и такая конструкция позволяет ограничителям свободно отклоняться вместе с парусом только вверх - вниз их не пускает переднее плечо, упирающееся в боковую трубу. Мототележка подвешивается под крылом в одной точке на одностепенном шарнире. Мотогондола ферменно-расчалочной конструкции выполнена из труб Д16Т(для снижения ЭПР рекомендую выполнять из углепластика или клееных деревяных балок - см. эскиз сборочного узла балки в файле "longeron_СБ.spl" или на картинках внизу). Элементы горизонтальной треугольной рамы имеют ф 40х1.5; вертикальной - ф 40х2. Ось основных колес шасси также из труб ф 40х2 и ф 45х1.5 . Горизонтальная и вертикальная рамы замкнуты силовым каркасом контейнерной кассеты. Для большей жесткости и надежности вертикальная рама связана с горизонтальной регулируемыми растяжками ф 2.5 мм . Все соединения элементов каркаса - шарнирные, позволяющие легко складывать мототележку. На вертикальной раме, позади контейнерной кассеты смонтированы моторама и предохранительная опора. Основные колеса шасси размером 280х85 мм (китайское изделие - для базарных тележек). Передняя стойка шасси - колесо 200х80 мм (китайское изделие - для базарных тележек). Амортизация при взлете и посадке осуществляется за счет упругой деформации конструкции мото- гондолы и пневматики клес. Мотор - лодочный подвесной, либо мотоциклетный (если поставите микролитражный от Субару, Дэу или Дайхатсу, то конструкцию МДП нужно будет усилить). Карбюратор присоединяется к картеру двигателя угловым патрубком, обеспечивающим горизонтальное положение поплавковой камеры. Воздушный винт - ф 914 мм с шагом 400 мм . Отсутствует редуктор, т.е. винт крепится шестью болтами М8 через втулку из стали 40Х прямо к выходному валу двигателя. Лопасти винта выполнены широкими для сохранения коэффициента тяги при высокой угловой скорости. Винт - моноблочный, склеен из перемежающихся слоев древесины липы и бука и армирован угле- и стекло- пластиками. в начало раздела 2.3 ЭЛЕКТРИЧЕСКИЕ СХЕМЫ И СПЕЦИФИКАЦИИ Электрические схемы приведены для опытно-экспериментального варианта изделия, и они будут изменены и дополнены для серийного изделия. В опытно-экспериментальном изделии "Шахид-1", используется бытовая(конторская) микроЭВМ (она выполняет функции УЭВМ) настольного форм-фактора - дэсктоп (разумеется, используется лишь системный блок дэсктопа, а точнее импульсный блок питания, системная(материнская) плата и флеш-диск(ЭСППЗУ с записанной в нее ОС и всем ПО) воткнутый в USB-порт). В настройках BIOS (BIOS setup) дэсктопа обязательно нужно установить режим пониженного энергопотребления, и соответственно используемый дэсктоп должен иметь предусмотренный подобный режим. В серийном изделии "Шахид-1" будет применяться микроЭВМ малогабаритного форм-фактора - ноутбук, лэптоп. Лэптопы(ноутбуки) оптимизированы для электропитания от малогабаритных аккумуляторных батарей, и поэтому имеют пониженное электропотребление. Аппаратных ресурсов любого современного(и не очень) лэптопа более чем достаточно для вычислительных работ, выполняемых УЭВМ изделия, причем в любом режиме(в BIOS setup лэптопа, также есть режим пониженного энергопотребления, при котором быстродействие лэптоповского микропроцессора снижается в несколько раз по сравнению с обычным). Лэптоп будет запитан от бортовой сети по +12 [В] через сглаживающий фильтр. Для военной серийной версии изделия "Шахид-1" необходимо применять лэптоп, периферию(датчики), ИМС и ЭРЭ стойкие к воздействиям ионизирующих излучений с высокой интенсивностью и высоким уровнем, например, вместо ИМС серий 155,555,1533,561 серии 133,533,564. Такие требуемые компоненты изделия(радиационностойкие лэптоп,периферию,ИМС,ЭРЭ) довольно хлопотно доставать и они дороже гражданских аналогов(но и понадежнее, так что переплата будет оправдана). Если изделие применяется в экстремальных условиях, но радиация незначительна, то можно применять компоненты класса "индастриал"(промышленного назначения). в начало раздела 2.3.1 СХЕМА ЭЛЕКТРИЧЕСКАЯ СТРУКТУРНАЯ Смотрите в файле "Э1.spl" . 2.3.2 СХЕМА ЭЛЕКТРИЧЕСКАЯ ФУНКЦИОНАЛЬНАЯ Смотрите в файле "Э2.spl" . 2.3.3 СХЕМЫ ЭЛЕКТРИЧЕСКИЕ ПРИНЦИПИАЛЬНЫЕ Нумерация в позиционных обозначениях ЭРЭ и прочих компонент, указанных на принципиальных схемах всех узлов и блоков - сквозная. 2.3.3.1 ОПИСАНИЕ ВНЕШНИХ СИГНАЛОВ МОДУЛЯ УЭВМ (СИСТЕМНОГО БЛОКА НАСТОЛЬНОГО ПЕРСОН. КОМП.) "SELF_CLK" - тактовый сигнал на регистр сдвига модуля драйверов "SELF_CLK1" - тактовый сигнал на регистр сдвига модуля драйверов "SELF_DATES" - бит данных для регистра сдвига модуля драйверов (приставка "SELF" - бортовые сервоустройства) "ПУСК" - бит. команда общего пуска всей машины(пока нет) "START" - бит. команда на систему электропуска и электрозажигания мотоагрегата (включение стартерного электромотора) "RST" - бит от кнопки системного сброса компьютера "GND" - "Общий" для всей электросети("грязный") "GND_CUT" - "Общий" для модуля УЭВМ("чистый"), и при этом гальванически не связанный с "Общим" всей остальной электросети "VCC" - (+5) [В] питания модуля УЭВМ, и при этом гальванически не связанный с "GND" всей остальной электросети 2.3.3.2 КОМАНДЫ РАДИОУПРАВЛЕНИЯ [...] 2.3.3.3 ОПИСАНИЕ СИГНАЛОВ, ЦЕПЕЙ, ОРГАНОВ УПРАВЛЕНИЯ НА : МОДУЛЬ ДРАЙВЕРОВ БОРТОВЫХ СЕРВОПРИВОДОВ, СИСТЕМУ ЭЛЕКТРОПУСКА,ЭЛЕКТРОЗАЖИГАНИЯ,ЭЛЕКТРОСНАБЖЕНИЯ "ВЛЕВО" - фаза на электромагнит соотв. руля (для поворота по часовой стрелке(вид сверху) руля курса) "ВПРАВО" - фаза на э/магнит соотв. руля (для поворота против часовой стрелки(вид сверху) руля курса) "ВНИЗ" - фаза на э/магнит поворота в шарнире подвески мотогондолы (для поворота по часовой стрелке(вид слева по ходу) плоскости крыла относительно поскости мотогондолы - в шарнире подвески) "ЕЛЕ-ЕЛЕ" - фаза на э/магнит устанавливающего дроссель газа в положение "ГАЗ_САМЫЙ_МАЛЫЙ" "МАЛЫЙ" - фаза на э/магнит устанав-го дроссель газа в полож. "ГАЗ_МАЛЫЙ" "СРЕДНИЙ" - фаза на э/магнит устанав-го дроссель газа в полож. "ГАЗ_СРЕДНИЙ" "БОЛЬШОЙ" - фаза на э/магнит устанав-го дроссель газа в полож. "ГАЗ_БОЛЬШОЙ" "ЗАПУСК" - (+12) [В] на систему электропуска и электрозажигания мотоагрегата (включение стартерного электромотора) "ОСТАНОВ" - фаза на э/магнит тормоза колес шасси(пока нет) "GND" - "Общий" для всей электросети("грязный") "GND_CUT" - "Общий" для логики модуля драйверов("чистый"), и при этом гальванически не связанный с "Общим" всей остальной электросети "VCC" - (+5) [В] питания логики модуля драйверов, и при этом гальванически не связанный с "GND" всей остальной электросети +12[B] - питание цепей сервоприводов электропуска и электрозажигания мотоагрегата, связано с "Общим" силовых цепей, т.е. отсчитывается от "GND" "PHASE" - фаза 2.3.3.4 ОПИСАНИЕ СИГНАЛОВ БОРТОВЫХ СЕНСОРОВ [...] в начало раздела 2.3.3.5 ОПИСАНИЕ ЭЛЕКТРОПИТАНИЯ На структурной и функциональной схемах, +12[B] и +5[B] гальванически не связаны меж собой. +12[B] - связано с "Общим" силовых цепей, т.е. отсчитывается от "GND" . +5[B] - связано с "Общим" модуля УЭВМ, т.е. отсчитывается от "GND_CUT" . 2.3.3.6 ОПИСАНИЕ РЕШЕНИЯ ПРОБЛЕМЫ ВНУТРЕННИХ ПОМЕХ И НАВОДОК [...] 2.3.3.7 ОПИСАНИЕ И ДОПОЛНЕНИЯ (ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ) К ПРИНЦИПИАЛЬНЫМ ЭЛЕКТРИЧЕСКИМ СХЕМАМ [...] 2.3.3.8 РЕЗЮМЕ [...] 2.3.3.8.1 МОДУЛЬ ДРАЙВЕРОВ [...] 2.3.3.8.2 РАДИОПРИЕМНИК СИСТЕМЫ ДУ [...] в начало раздела 2.3.3.8.3 СЕРВОПРИВОДЫ БОРТОВЫХ УСТРОЙСТВ Выбраны станочные электромагниты на 220 В ввиду их доступности, высокому значению допустимой частоты срабатываний при ПВ=100%, большому тяговому усилию при достаточном ходе(произведение силы на перемещение равно работе, а работа за секунду - мощности), достаточной надежности. Высокое напряжение означает небольшой ток (произведение напряжения на ток равно полной потребляемой из сети мощности), что позволяет использовать нетолстые провода (пускай изоляция потолще, но пластмасса стоит намного дешевле меди), и к тому же ЭПР машины будет поменьше (а значит ее труднее будет засечь и отследить методами активной радиолокации). 2.3.3.8.3.1 СЕРВОПРИВОД РУЛЯ НАПРАВЛЕНИЯ Расчет требуемого момента для поворота курсового руля (этот момент, обычно называемый шарнирным, создается в кривошипно-шатунном механизме(КШМ), и соответственно с учётом параметров этого КШМ определяетя требуемое усилие на ползуне и требуемый ход якоря соответствующего приводного электромагнита) будет приведен позднее. Пока, укажу лишь оценочные факторы, на основании энергетических параметров и несложной статистики. Момент, необходимый для поворота руля пропорционален квадрату воздушной скорости. Воздушная скорость дрона-мотодельтаплана "Шахид-1" (см. ЛТХ) равна примерно 60 км/час и соответствует такому же параметру у средней авиамодели. Момент, также пропорционален площади руля. Площадь курсового руля у моего дрона больше площади руля типичной авиамодели примерно в 100 раз. Также, момент пропорционален плечу(хорде руля). Хорда курсового руля у моего дрона, примерно на порядок больше таковой у типичной авиамодели. Значит, требуемый момент будет примерно в 1000 раз больше, чем момент развиваемый авмамодельной рулевой машинкой средней типовой мощности. Угол поворота руля моего дрона такой же, как максимальный угол поворота руля у типичной авиамодели. Произведение среднего момента на угол равно работе, совершаемой рулем при повороте его на этот угол. Если учесть, что максимальная скорость перекладки рулей авиамодели составляет доли секунды при повороте руля на максимальный угол, то необходимая механическая мощность развиваемая рулевым приводом Шахида, должна быть примерно в 1000 раз больше такого же параметра у рулевой машинки авиамодели. Далее. К.п.д у КШМ больше, чем к.п.д. у многоступенчатого(три или четыре ступени) редуктора на зубчатых шевронных(либо прямозубых) цилиндрических колесах рулевой машинки, но к.п.д. безщеточного электродвигателя постоянного тока на 12 [В] больше, чем к.п.д. электромагнита на 220 [В]. Значит, потребляемая мощность подходящего электромагнита будет в 2000...3000 раз больше потребляемой мощности безщеточника рульмашинки средней типичной авиамодели. Приведенные в этом разделе оценки позволят не допустить грубой ошибки при заказе и покупке электромагнита. в начало раздела 2.3.3.8.3.2 СЕРВОПРИВОД ПОВОРОТА КРЫЛА В последующем будет приведен проектный (т.е. настоящий, с указанием допустимых отклонений параметров компонент и значений коэффициентов запаса) расчет требуемого момента для поворота крыла относительно мототележки (для установки угла атаки близкого к критическому при достаточной воздушной скорости, это нужно, например при взлете, при наборе высоты). ТАБЛИЦА СПЕЦИФИКАЦИИ (ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ) ----------------!---------------------------------------!--------------------------------- Поз. обознач. ! Электрорадиоэлемент или компонент ! Примечание ----------------!---------------------------------------!--------------------------------- ! ! ! ! DD1 ! 155ИР1 ! DD2 ! 155ИР1 ! DD3 ! 155ИР1 ! DD4 ! 155ИР1 ! DD5 ! 555ТЛ2 ! ! ! ! ! ! ! ! ! ! ! ! ! VT1 ! АОТ123В ! VT2 ! ! ! ! ! ! ! ! ! ! ! ! ! ! VD ! Д226 ! VD ! АЛ307КМ ! ! ! ! ! ! ! ! ! ! ! VS1...VS8 ! КУ208Г ! VS9...VS16 ! МОС3041 ! ! ! ! ! ! ! C1...С3 ! К10-17б-H90-0,47мкФ ! C4 ! 260 [В] , 0.27 [мкФ] ! на сист. зажиг. мотоцикла ! ! ! ! L1 ! импульсный высоковольтный ! на сист. зажиг. мотоцикла ! автотрансформатор ! ! ! ! ! FU1...FU8 ! 5[A] ! указаны номиналы ! ! ! ! ! ! ! ! ! ! R1...R8 ! МЛТ-0,125-270 Ом +-10% ! R9...R16 ! МЛТ-0,5-11 KОм +-10% ! R17 ! МЛТ-0,125-470 Ом +-10% ! R18 ! МЛТ-0,5-120 KОм +-10% ! R ! ! ! ! ! ! ! ! ! ! X1 ! DB25 вилка ! X2...X15 ! клеммы ! ! ! ! ! ! ! ! ! ! ! K1...K7 ! электромагниты МИС1100Е ! станочные электромагниты на 220 В ! ! ! ! ! ! ! ! ! ! SW1 ! прерыватель ! на сист. зажиг. мотоцикла ! ! ! ! ! ! А1 ! инвертор ! 12[B] -> 220[B]; А2 ! ИБП(имп. блок питания) ! от персонального компьютера А3 ! аккум. батарея(стартерная) ! напр. для мотоцикла,микролитражки A4 ! "GlobalSat BT-338" ! GPS-приемник с интерф. BlueTooth А5 ! сист. блок бытовой микроЭВМ ! ! desktop форм-фактора ! ! (сист.блок настольного перс.комп.) ! A6 ! генератор ! на мотоцикл А7 ! свеча зажигания ! на сист. зажиг. мотоцикла А8 ! реле-регулятор ! на мотоцикл А9 ! стартерный электромотор ! на мотоцикл ! ! ! ! ----------------!---------------------------------------!--------------------------------- в начало раздела 2.4 КИНЕМАТИЧЕСКИЕ СХЕМЫ И КОНСТРУКТИВНО-МЕХАНИЧЕСКИЕ ЧЕРТЕЖИ, ЭСКИЗЫ И СПЕЦИФИКАЦИИ Эскиз узла(сборочной единицы) деревяной клееной балки приведен в файле "longeron_СБ.spl" . В нем размер 500 мм - шаг между вклеиваемыми брусками . Для этого узла рекомендую материал для деталей - сосновая древесина(просушенная) . В качестве клея можно использовать практически любой столярный клей(казеиновый, смоляной, карбинольный и карбамидный) . Узлы, полученные склеиванием, необходимо затем покрыть лаком стойким и не пропускающим влагу. Также, все деревяные узлы и детали необходимо покрыть таким лаком. Боковые(лонжеронные балки) работают в основном на изгиб, если построить эпюру изгибающих моментов, то наиболее нагруженные сечения будут которые возле узлов крепления к ним поперечных балок, при этом наиболее вероятное разрушение(т.е. потеря несущей способности) возможно по феномену хрупкого разрушения при превышении макс. растягивающих напряжений (в наиболее нагруженном, при изгибе балки, сечении) допустимых значений ("сигма вэ доп"). Выполнять проверочный прочностной расчет на проверку по этому нагружению нет смысла, по следующим резонам: 1. У прототипа(дюралевой тонкостенной трубы) заведомо ниже допустимые изгибающие моменты при разрушении её при потере ею устойчивости(такой вид потери несущих способностей дюралевой тонкостенной трубы более вероятен, нежели превышение нормальных напряжений в наиболее нагруженном, при изгибе, сечении) . 2. Для автоматической(беспилотной) машины нет смысла закладывать такие высокие максимально возможые динамические нагрузки, которые в основном из-за маневрирования с высокими нормальными и тангенциальными ускорениями(что и означает перегрузку), поскольку дроны развивают меньшие ускорения ввиду отсутствия субъективных качеств у САУ, т.е. попросту говоря, автоматика выполняет требуемые маневры МДП с заведомо меньшими перегрузками нежели пилот, подверженный эмоциям,утомлению и прочим человеческим особенностям. А раз максимально возможные динамические нагрузки будут меньшими, то и коэффициент запаса прочности(по макс. допустимому нормальному растягивающиму напряжению в сечении с максимальным изгибаюшим моментом) будет меньшим . Кинематическая схема механизма привода поворота курсового руля приведена в файле "driver_course_rule_КнмСх.spl" . Эскиз узла курсового руля вместе с частью остальной конструкции машины(той, которая стыкуется с ним) приведен в файле "course_rule_СБ.spl" . Детали, подузлы и другие узлы в нем : 1 - аэродинамическая поверхность(сам руль) 2 - вал(к нему жестко крепится сам руль) 3 - подузел привода поворота(см. выше) 4 - носовой узел(не входит в узел курсового руля) 5 - боковой узел(не входит в узел курсового руля) 6 - боковая балка(не входит в узел курсового руля) 7 - ребровая(подкосная) балка 8 - осевая балка 9 - килевой носовой демпфер-дестабилизатор(стабилизирует по угловой скорости рыскания, т.е. демпфирует по углу рыскания, и дестабилизирует по углу рыскания). Кинематическая схема механизма привода перемещения тросика газа приведена в файле "driver_power_КнмСх.spl" . Кинематическая схема механизма привода поворота шарнира подвески мотогондолы приведена в файле "driver_hinge_КнмСх.spl" . [Далее формируется] в начало раздела 2.5 ПРОГРАММНОТЕХНИЧЕСКАЯ ДОКУМЕНТАЦИЯ 2.5.1. ОБЩЕЕ ОПИСАНИЕ Основная часть штатного программного обеспечения написана на ANSI-C и JAVA, и таким образом является аппаратно и системно независимой(т.е. переносимой при условии повторной компиляции(если ANSI-C) или даже полностью переносимой(если JAVA) под штатную микроЭВМ конкретного носителя). Та часть штатного программного обеспечения, которая зависит от типа микропроцессора(системы его команд) микроЭВМ и от её операционной системы, написана на ANSI-C с использованием библиотек пакета Symantec C++ v. 7.50, и выполняет следующие системно-зависимые операции : 1) отслеживание и подсчёт реального(системного) времени до милисекунд; 2) побайтное считывание с последовательного COM-port(если RS-232C), либо побайтное считывание с последовательного виртуального(логического) COM-port(если USB или BlueTooth, или BlueTooth поверх USB); 3) чтение-запись через параллельный порт LPT(стандартный интерфейс "Centronix"). Системно-зависимые функции используют стандартные функции библиотеки win32(c), которые в пакете Symantec C++ v. 7.50 . Логически, штатное программное обеспечение разнесено по пяти частям. Эти логические части имеют следующие наименования и выполняют следующие функции : "виртуальный_штабист" - выполняет в диалоговом,интерактивном режиме считывание программной траектории и остальной циклограммы спецоперации, вводимой пользователем, при этом производит контроль их на предмет корректности, а затем записывает их в определенном формате в долговременную энергонезависимую память УЭВМ(например на хард-диск микроЭВМ); "виртуальный_пилот" - выполняет вождение машины(изделия) по траектории, задаваемой виртуальным штурманом, выполняя его траекторные коррекции; "виртуальный_штурман" - выполняет контроль текущих кинематических параметров МДП посредством считывания каких-то из них напрямую с NMEA (мгновенная путевая скорость, мгновенная высота над уровнем моря, мгновенный курсовой угол), или посредством вычисления других из данных того же NMEA (мгновенные координаты положения(нормализация широты и долготы), проекции мгновенного вектора скорости(численное дифференцирование высоты над уровнем моря, для определения вертикальной проекции), ускорения(численное дифференцирование скорости), мгновенная угловая скорость рыскания(численное дифференцирование курсового угла) ), производит экстраполяцию кинематических параметров с учетом динамических характеристик МДП и текущих кинематических параметров, вычисление кодов коррекции, выдачу их виртуальному пилоту; "виртуальный_бомбардир" - вычисляет величину и направление вектора средней скорости ветра, вычисляет траекторию свободного падения объектов с учетом : 1) ветра (направление,скорость), 2) силы аэродинамического сопротивления (которая, как известно, пропорциональна квадрату относительной воздушной скорости, т.е. зависит в конечном счете от того же ветра и кинематических параметров в момент бомбометания - вектора мгновенной скорости центра масс, радиус-вектора координат центра масс, а также от формы авиабомбы(мидель,заужение,стабилизаторы) ), 3) координат цели, 4) вектора средней скорости цели(если цель мобильна), и тем самым определяет необходимые поправки(координатные,скоростные) для точки сброса - что актуально для объектов типа авиабомба свободного падения, но менее актуально для объектов типа корректируемая авиабомба или управляемая планирующая авиабомба, и затем выдает сигналы на включение-отключение сервоустройств (типа блокиратора замка бомбодержателя), и которые перестают удерживать супротив силы гравитации те или иные объекты, помимо этого(постоянно) выдает на контроллер УАБ текущие пространственные координаты и значения вектора мгновенной скорости центра масс МДП; "виртуальный_стрелок" - производит вычисление упреждающих поправок аналогично бомбардиру, и выдает сигналы на изменение ориентации в пространстве и включение-отключение целевых сервоустройств, которые выполняют затем те или иные действия(например наводят в заданное направление пакеты с пиротехническими(иллюминационными) аппаратами и приборами или фотографическими аппаратами или кинематографическими аппаратами, или осветительными приборами или осветительными ракетами или противоградовыми ракетами и зарядами и инициируют их запалы или затворы и т.д.; "виртуальный_оператор" - выдает сигналы на включение-отключение целевых сервоустройств, которые выполняют затем те или иные целевые технологические операции(например подогревают жидкости, газы, порошки или их смеси, начинают смешивать их или повышают их давление,температуру, или меняют консистенцию смесей каким-либо иным способом) и т.д. . "Виртуальный_штабист" написан на JAVA, а все другие логические части написаны на каком-то диалекте C, либо на ANSI-C(см. выше). Циклограмма спецоперации, включающая в себя программную траекторию и привязанную к ней последовательность включения/отключения целевых сервоприводов(циклограмму целевых сервоустройств) сохраняется в файле "cicl", поэтому можно подготавливать циклограмму спецоперации на одной ЭВМ(например наземной), а в бортовую УЭВМ требуется лишь скопировать файл циклограммы. В соответствии с протоколом RS-232C, GPS-приемник передает на последовательный порт бытовой(конторской) микроЭВМ инфобиты с частотой определяемой на этот протокол(нужно установить в настройках Виндоуса скорость в бодах(в двоичной системе счисления равная бит/сек) равную той, которая указана в документации на GPS-приемник тоже самое касается чексуммы), затем передает контрольную сумму(до начала инфобайта и после чексум передает старт-стопы), после чего UART микроЭВМ начинает проверять чексум, затем UART выдает прерывание(через арбитр соотв. системной магистрали) на внутрикристальный контроллер прерываний, далее по правилу маскирований определяется текущая актуальность(или очередность) данного интеррапта и т.д. , прочие настройки нужно проводить в аргументах функций, которые оперируют с последовательным портом, которые(как указано выше) входят в стандартную библиотеку функций "win32(C)". В протоколе NMEA по умолчанию указана частота обновления выдаваемых данных равная 1 [Гц], эта частота до недавнего времени была максимальной, хотя уже появились приборы, которые обновляют выдаваемую навигационную инфу с частотой 5...10 [Гц] (там используется двоичный протокол таких фирм как SiRF(с), Atair(c) и др.) . "Виртуальный_штурман" ежесекундно, соответственно, получает и обрабатывает полученные текстовые строки. В случае сбоя работы УЭВМ, штатное программное обеспечение сможет парировать сбой. Сбои парируются(отрабатываются) в фазе полета, и не парируются в остальных режимах, поскольку длительность всех их(режимов) пренебрежимо мала в сравнении с продолжительностью полета, а потому вероятность сбоя во время их состояния считается нулевой. Штатная программа, для серийных изделий, будет продаватся только в объектном коде, и конкретный ее экземпляр будет работать только вместе с электронным ключом. Электронный ключ представляет собой отдельный блочок, подключаемый(подсоединяемый) к разъему(интерфейсу) УЭВМ (например к разъему интерфейса протокола RS-232C). Объектник штатной программы также будет продаваться в аренду (минимальный срок аренды - полгода). Объектник штатной программы, арендный, также, будет работать только с эксклюзивным(для данного конкретного экземпляра объектника) электронным ключом. Контроль за сроком использования(при аренде) будет производится посредством анализа текущей даты, приходящей по NMEA. В "виртуальном_штурмане" производится оптимальная фильтрация радионавигационной информации от различных гауссовых шумов (они в передатчике, в тракте распространения, в приемнике) с использованием оптимального пакетного фильтра Винера. Используемые методы и критерии : 1) метод наименьших квадратов, 2) метод Монте Карло, 3) метод интерполяции(аппроксимации) полиномами(ряд Тейлора). Длина выборки(число используемых отсчетов) изменяется в зависимости от предполагаемого участка программной траектории, от предполагаемого отклонения от программной траектории и от текущих параметров воздушной среды, и таким образом используется апостериорная информация, в качестве априорной информации используются динамические характеристики МДП и сама траектория. В каком-то смысле, отсутствие ИCС скомпенсировано громадной избыточностью вычислительных ресурсов УЭВМ. 2.5.2. БЛОК-СХЕМЫ Граф состояния машины - в файле "graph_pilot.spl" . Блок-схема алгоритма подпрограммы "виртуальный_пилот" - в файле "block-scheme_pilot.spl" . 2.5.3. ФРАГМЕНТ ТЕКСТА ИСХОДНИКА ШТАТНОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ УЭВМ В качестве примера приведу тело функции преобразующей навигационные параметры, считанные с GPS-приёмника через последовательный порт в текстовом формате в числовые форматы, соответствующие формату протокола NMEA. ----------------------------------------------------------------------- ... ... // при считывании очередного сообщения от NMEA, // скорость в узлах в текстовом формате : unsigned char vel_txt[10]; // (По международному определению, один узел равен 1,852 км/ч (точно).) . unsigned char knots;// то же, но в узлах . unsigned short alt_now;// мгнов. высота абсолютная(т.е. над ур.моря), [м] . unsigned long course_GPS;// мгновенный курс, [0.01 град] . // при считывании очередного сообщения от NMEA, // высота над уровнем моря в метрах в текстовом формате : unsigned char alt_txt[10]; // при считывании очередного сообщения от NMEA, // курс в до сотых долей градуса в текстовом формате : unsigned char crs_txt[10]; // ф-я преобраз-я курса и др. параметров(кроме координат) от NMEA // числовые форматы и отслеживания их новизны : void conversing_formats_courses(void) { unsigned char i,check_dec_point,first_pass,tmp; char j; unsigned short pow_10[4]; pow_10[0]=10;pow_10[1]=100;pow_10[2]=1000;pow_10[3]=10000; check_dec_point=alt_now=first_pass=0; // есть ли дес.точка и каков ее индекс : for(i=0;i<10;i++)if(alt_txt[i]=='.'){check_dec_point=1;break;} if(check_dec_point==1) {// если есть точка, то : for(j=i-1;j>=0;j--) {// перебор влево от дес.тчк. : tmp=alt_txt[j]-'0'; if(first_pass==0){alt_now=alt_now+tmp;first_pass=1;} else if(tmp!=0)alt_now=alt_now+pow_10[i-2-j]*tmp; } } else {;}// вообще-то, дес.тчк. должна быть . check_dec_point=knots=first_pass=0; // есть ли дес.точка и каков ее индекс : for(i=0;i<10;i++)if(vel_txt[i]=='.'){check_dec_point=1;break;} if(check_dec_point==1) {// если есть точка, то : for(j=i-1;j>=0;j--) {// перебор влево от дес.тчк. : tmp=vel_txt[j]-'0'; if(first_pass==0){knots=knots+tmp;first_pass=1;} else if(tmp!=0)knots=knots+pow_10[i-2-j]*tmp; } } else {;}// вообще-то, дес.тчк. должна быть . check_dec_point=course_GPS=0; // есть ли дес.точка и каков ее индекс : for(i=0;i<10;i++)if(crs_txt[i]=='.'){check_dec_point=1;break;} if(check_dec_point==1) {// если есть точка, то : for(j=i-1;j>=0;j--) {// перебор влево от дес.тчк. : tmp=crs_txt[j]-'0'; if(tmp!=0)course_GPS=course_GPS+pow_10[i-j]*tmp; } // перебор вправо от дес.тчк. : tmp=crs_txt[i+1]-'0'; if(tmp!=0)course_GPS=course_GPS+10*tmp; course_GPS=course_GPS+(crs_txt[i+2]-'0'); } else {;}// вообще-то, дес.тчк. должна быть . }// END OF conversing_formats_courses() ... ... -------------------------------------------------------------------------------------- В Интернете уже давно есть исходники библиотек функций для работы с навигационными данными в NMEA-формате. Так что ищите и потребляйте! Не надо, почти, напрягать мозгу... Впрочем, весь оупэн-сорс в Интернете, для всякой чучмечной башкармы - абракадабра не имеющая для неё никакой ценности... [Далее формируется] в начало раздела 2.6 ТЕХНОЛОГИЧЕСКАЯ ДОКУМЕНТАЦИЯ Технология изготовления ДП(МДП) подробно изложена в информационных источниках, указанных в разделе "4. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ, ОБЪЕКТЫ И ПРОТОТИПЫ". Технология радиоэлектронно-регулировочных операций, операций записи штатных программ в память УЭВМ, прочих технологических операций связанных с сервисными технологическими программами будет изложена далее. [Далее формируется] 2.7. ИНСТРУКЦИЯ ПО ЭКСПЛOАТАЦИИ [Формируется] 2.8. СИСТЕМОТЕХНИЧЕСКАЯ ДОКУМЕНТАЦИЯ 2.8.1. ОСОБЕННОСТЬ ОБЪЕКТА УПРАВЛЕНИЯ Мотопланеры, помимо дешевизны(и из-за неё), отличаются от аэропланов: 1) низкой тяговооруженностью(энерговооруженностью), 2) меньшей удельной нагрузкой на крыло, 3) их несущие аэродинамические поверхности(крылья) имеют большую кривизну профилей и большую толщину профилей(применяются профили оптимизированные для низких скоростей обтекания), иногда применяются выпукло-вогнутые профили, 4) меньшей крейсерской скоростью(является следствием предыдущих параметров); и поэтому имеют сравнительно низкие динамические характеристики (большая постоянная времени переходного процесса), но их точностные характеристики получше, так как скорости низкие. Точностные характеристики САУ летательных аппаратов могут быть такими : 1) среднеквадратичное отклонение(СКВО) реальной траектории от программной траектории; 2) СКВО реальных мгновенных углов ориентации от программных (эти отклонения могут быть важны, например, в случае отсутствия на борту шпионского ЛА стабилизированной платформы для фото,теле,кино аппаратуры); 3) СКВО первых и вторых производных по времени предыдущих параметров (эти отклонения важны, например, при бомбометании бомб свободного падения или пуске НУРСов). 2.8.2. САУ ШАХИДА Строго говоря, САУ - это замкнутая система с обратной связью, включающая в себя и сам МДП, как объект управления, и автопилот, как управляющее устройство, и различные датчики, а их может быть великое множество: магнитометры,барометры,вариометры,радиовысотомеры,радиовысотомеры_с_распознавателями_рельефа, тензометры,астродатчики,термометры,указатели_горизонта_инфракрасные_фотоприемные_диодные, расходомеры,датчики_положения_Солнца,видеокамеры_с_распознаванием_изображений,тахометры, инерциальные_измерители(гироскопы,акселерометры),приемники_радиомаячных_систем(например GPS), аэролаги,ультразвуковые_высотомеры_низковысотные,лазерные_дальномеры,допплеровские_измерители, измерители-указатели_истинной_воздушной_скорости,гравитометры(измерители местной силы тяжести для сверхточной коррекции в ИНС) и т.д.; все эти датчики, оснащаются встроенной программной обработкой (причем их встроенное ПО обеспечивает решение и системных задач, например поддержка протоколов обмена с внешней системой, и решение прикладных задач, например фильтрация); но все эти датчики, в конечном счете, необходимы для выдачи инфы об ограниченном числе прикладных физических параметров: кинематики_мотодельтаплана,состояния_его_внутренних_агрегатов,температуры_воздуха, вектора_относительной_скорости_воздуха(векторы местных скоростей воздушных потоков обтекающих кромки конструкции летательного аппарата), давления_атмосферного(если не предусмотрена коррекция пересчётом через высоту над уровнем моря). Как много раз указывалось ранее, в САУ Шахида используется только пассивная стабилизация. Постоянная времени САУ Шахида, при разомкнутом контуре ОС, равна постоянной времени МДП. Управление по курсу, у Шахида, является процессом взаимодействующим только с навигацией. Управление по высоте, у Шахида, является процессом взаимодействующим только с навигацией. Вся навигация(навигационная информация) приходит от GPS-приемника. Управляющие воздействия в САУ являются импульсными, точнее цифровыми, т.е. дискретна и величина воздействий, и длительность воздействий - метод цифрового ШИУ. Длительности воздействий адаптируются САУ к условиям полета. Вычисление оригиналов передаточных функций(они в памяти УЭВМ формируются и сохраняются в виде многомерных массивов) производится периодически по мере изменения параметров(например массы выгораемого топлива), в свою очередь, эти изменяемые параметры определяются косвенно(не напрямую), т.к. отсутствуют необходимые датчики(если надо будет, то будет введена программная коррекция либо по показанию датчика остатка топлива, либо по времени полёта). САУ Шахида является цифровой, адаптивной. Примечание. Термины "мгновенная скорость" и "мгновенные координаты" (и т.д.) являются условными и измеренные(либо вычисленные) мгновенные скорости и координаты не соответствуют таковым подразумеваемым в теоретической механике(там они абстрактны - идеальны). Так как все измерения кинематических параметров производятся одиночным GPS-приемником, который в свою очередь производит улучшающие обработки(некий вид динамической фильтрации), которые в свою очередь вносят фазовые задержки в общую модель системы. Постоянная времени системы с разомкнутым контуром обратной связи составляет не менее восьми секунд, поэтому фазовая задержка, вносимая измерителем в контур обратной связи(GPS-приемник) равная 1..2 секунды несильно снижает качество управления. Кроме того, фазовые задержки в значительной мере компенсируются путем использования апостериорной информации об отклонении от программной траектории. 2.8.3. ВОЗМОЖНЫЕ ИЗМЕНЕНИЯ САУ В большинстве промышленных автопилотах все-ж есть межканальная связь, например для типичного аэроплана все-таки нужно регулировать крен при изменении курса(правильный, т.е. координированный разворот либо вираж, если разворот на угол "два пи"), но для мотопланера можно обойтись и без межканальной связи(по соображениям изложенным в начале, т.е сойдет и плоский разворот), но в серийной версии Шахида, скорее всего, будет добавлен контур управления по каналу крена (будут добавлены: пара электромагнитов, пара тросово-блочных механизмов и пара закрылков - в виде оттягиваемых задних боковых кромок паруса), что позволит надёжно избегать "голландского шага". в начало раздела
в начало страницы в начало страницы
3. ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ДЛЯ ИЗГОТОВЛЕНИЯ И ЭКСПЛОАТАЦИИ 3.1. ВВЕДЕНИЕ 3.2. ТЭО ДЛЯ ЕДИНИЧНОГО ПРОИЗВОДСТВА 3.3. ТЭО ДЛЯ ПРИМЕНЕНИЯ В СЕЛЬХОЗАХ 3.4. ТЭО ДЛЯ ПРИМЕНЕНИЯ ДЛЯ МОНИТОРИНГОВ 3.5. ТЭО ДЛЯ ПРИМЕНЕНИЯ В СВЯЗЯХ (РЕТРАНСЛЯТОР) 3.6. ТЭО ДЛЯ ПРИМЕНЕНИЯ В ПЕРЕВОЗКАХ И ДОСТАВКАХ 3.7. ТЭО ДЛЯ ПРИМЕНЕНИЯ В ПРОЧИХ 3.8. ТЭО ДЛЯ ПРИМЕНЕНИЯ ДЛЯ ЗАПИСЕЙ (НАПРИМЕР ДЛЯ КИНЕМАТОГРАФИИ) 3.9. ТЭО ДЛЯ ПРИМЕНЕНИЯ В ВОЙНЕ 3.10. ТЭО ДЛЯ ПРИМЕНЕНИЯ В ДИВЕРСИОННО-ТЕРРОРИСТИЧЕКИХ ОПЕРАЦИЯХ И ПРОЧИХ СПЕЦОПЕРАЦИЯХ 3.1. ВВЕДЕНИЕ Провести технико-экономические расчеты для ТЭО для производства и эксплоатации такого неординарного средства производства(или транспортного средства, кому какая классификация больше нравится), как авиационный робот(к каковым, в том числе, можно отнести автоматический МДП) довольно сложно, и поэтому данный раздел не претендует на особую точность и несомненно будет уточняться в последующем по мере получения фактических данных из практики производства и эксплоатации. 3.2. ТЭО ДЛЯ ЕДИНИЧНОГО ПРОИЗВОДСТВА 3.2.1. БАЗОВЫЙ(АЛЬТЕРНАТИВНЫЙ) ВАРИАНТ В настоящий момент (по состоянию на апрель 2010 г.) я не распологаю информацией о наличии в оптовой или розничной продаже, где-либо, автоматических МДП. Достаточно точное значение розничной среднерыночной цены на легкий(одноместный) пилотируемый (то есть неавтоматический) МДП в г.Бишкек (по состоянию на апрель 2010) равно 1500 долларов США. Пилотажно-навигационный комплекс(ПНК) для сверхлегкого летательного аппарата(СЛА), вероятно, можно приобрести в рознице по цене не ниже 500 долларов США. Сервоприводы для типовых СЛА в рознице стоят не менее (один комплект для одного СЛА) 500 долларов США за комплект. Сторонние услуги по адаптации покупного ПНК под типовые сервоприводы и соответственно под МДП, будут иметь цену не ниже 1000 долларов США. Таким образом, единичное производство автоматических МДП при технологии применения готовых покупных агрегатов и систем может обеспечить себестоимость единицы продукции не ниже 3500 долларов США, и это при том, что даже принципиальная возможность получения работоспособного автоматического МДП, при таком подходе, весьма не очевидна. 3.2.2. ПРЕДЛАГАЕМЫЙ ВАРИАНТ В предлагаемом мною варианте, используется оригинальная(то есть разработанная мною) техническая документация(глубина проработки, в основном, - рабочая документация), которую я оцениваю в 500 долларов США. В предлагаемом мною варианте, МДП изготавливается(не покупается) из следующих покупных узлов, агрегатов,деталей,материалов (цены указаны среднерыночные и с округлением в верхнюю сторону для г.Бишкек по состоянию на апрель 2010 г.) : 1. Мотоагрегат - 300 долларов США. 2. Ткани для изготовления паруса - 70 долларов США. 3. Деревяные рейки для изготовления несущих балок - 50 долларов США. 4. Деревяная балка для изготовления воздушного пропеллера(винта) - 30 долларов США. 5. Пластмассовые трубки для изготовления лат(аналог нервюр) - 40 долларов США. 6. Электромагниты для изготовления сервоприводов - 40 долларов США. 7. Бытовая(конторская) микроЭВМ(например лэптоп) - 100 долларов США. 8. GPS-приемник или GPS-модуль - 50 долларов США. 9. Прочая электроаппаратура,электрорадиодетали,компоненты и приборы - 100 долларов США. Таким образом, себестоимость комплектующих на одно изделие составит примерно 800 долларов США. Сторонние(аутсорсинговые) услуги, включают в себя услуги, состоящие из таких технологических операций как : 1. Швейная(парус). 2. Фасонное_шлифование(заготовки пропеллера после ее предварительного фрезерования). 3. Балансировочная(пропеллер). Я оцениваю цену сторонних(аутсорсинговых) услуг в 200 долларов США. Все прочие технологические операции, которые необходимо выполнить при изготовлении одного экземпляра автоматического МДП (слесарные,радиомонтажные,регулировочные,испытательные), я выполню самостоятельно и оцениваю их в 500 долларов США. Таким образом, себестоимость одного изделия при единичном производстве составит не более 1500 долларов США и вероятность получения работоспособного изделия весьма высока, поскольку используется оригинальная(то есть полностью понимаемая,осознаваемая,контролируемая) техническая документация. 3.2.3. ВЫВОД И наконец приходим к выводу, что экономия при единичном производстве одного изделия составит не менее 2000 долларов США из расчета на одно изделие. в начало раздела 3.3. ТЭО ДЛЯ ПРИМЕНЕНИЯ В СЕЛЬХОЗАХ 3.3.1. ИСХОДНЫЕ ДАННЫЕ 1. Почасовая зарплата пилота МДП (среднеказахстанская) не менее 10 долларов США за час работы. 2. Средний часовой расход бензина (примерно) 4 литра в час. 3. Средняя цена бензина (примерно) 0.8 долларов США за литр. 4. Масса пилота (примерно) 70 килограмм. 5. Усредненная масса полезной нагрузки МДП (примерно) 70 килограмм. 6. Услуги оператора-планировщика-заправщика-загрузчика, подготавливающего и вводящего циклограмму работы автоматического МДП, из расчета на час эксплоатации автоматического МДП (примерно) 1 доллар США. 7. Средняя продолжительность работы МДП с одной загрузкой горючим и расходными технологическими материалами (примерно) 2 часа. 8. Среднесуточная продолжительность работы АМДП (примерно) 16 часов. 9. Средняя продолжительность работы автоматического МДП(АМДП) с одной загрузкой горючим и расходными технологическими материалами (примерно) 4 часа. 3.3.2. ПОЧАСОВЫЕ ЗАТРАТЫ ПРИ ЭКСПЛОАТАЦИИ НЕАВТОМАТИЧЕСКОГО(ПИЛОТИРУЕМОГО) МДП Затраты на эксплоатацию с одной загрузкой : 10*2 + 2*4*0.8 = 26.4 долларов США ; Затраты_на_час_эксплоатации = 26.4 / 2 = 13.2 доллара США . 3.3.3. ПОЧАСОВЫЕ ЗАТРАТЫ ПРИ ЭКСПЛОАТАЦИИ АВТОМАТИЧЕСКОГО(БЕСПИЛОТНОГО) МДП Затраты на эксплоатацию с одной загрузкой : 4*4*0.8 + 4*1 = 16.8 доллара США . Затраты_на_час_эксплоатации = 16.8 / 4 = 4.2 доллара США . 3.3.4. ВЫВОД Экономия на час эксплоатации автоматического(беспилотного) МДП составит (примерно) 9 долларов США . Рентабельность на час эксплоатации автоматического МДП составит (примерно) 200 процентов . В данный момент мне не представляется возможным подсчитать экономическую выгоду от сокращения сроков выполнения сезонных технологических аграрных операций, которые критичны по климатическим стохастическим параметрам (например может потребоваться очень быстро выполнить дефолиацию, каковая возможна, в какой-то конкретной ситуации, только в очень коротком временном интервале, но не будет хватать конкретных живых пилотов, которые к тому же не могут (да и не имеют права по технике безопасности(типа "Правил выполнения полетов при выполнении авиахимработ") летать в темное время суток. Выполнять авиахимработы в светлое время суток зачастую нельзя, хотя выполнять полеты при этом можно, поскольку наличествуют специфические требования и явления. Сингулярности и нерегулярности векторных полей в приземной атмосфере (термики) более выражены и продолжительны в светлое время суток, чем по ночам. Допустимые скорости ветра при авиахимработах меньшие, нежели чем при выполнении многих других видов полетов. в начало раздела
в начало страницы в начало страницы
4. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ, ОБЪЕКТЫ И ПРОТОТИПЫ 4.1. ИСПОЛЬЗОВАННЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ а) Журнал "Моделист-Конструктор", 1986 год - в нем содержится описание конструкции и технологии изготовления, испытания, настройки (довольно сжато) одноместного пилотируемого мотодельтаплана "Поиск-04" ; б) по адресу http://aeroclub.com.ua в разделе "Мотодельтапланы" и других разделах располагаются информационные материалы необходимые и достаточные для единичного изготовления пилотируемого МДП, а также потребные для его настройки(регулировки), контроля, эксплоатации, ремонта(восстановления) и прочего; тут же расположены файлы с документацией на мотодельтаплан "Поиск-04", либо можете загрузить архивный файл с документацией на мотодельтаплан "Поиск-04" прямо с этой гиперссылки ; в) прочие инфоисточники указаны гиперссылками в разделе : "8. НАИБОЛЕЕ ИНТЕРЕСНЫЕ И ВАЖНЫЕ ПРОТОТИПЫ И ТЕНДЕНЦИИ И МОИ КОММЕНТАРИИ" . 4.2. ДРОНЫ-ПАРАГЛАЙДЕРЫ КАК ПРОТОТИПЫ, СРАВНЕНИЕ ДРОНОВ-МДП С ДРОНАМИ-ПАРАГЛАЙДЕРАМИ И С ДРОНАМИ-АЭРОПЛАНАМИ Как это ни удивительно, но мне нигде не попадались упоминания о беспилотных летательных аппаратах на базе мотодельтапланов. Есть несколько БПЛА на базе параглайдеров(иногда параглайдеры называют парамоторами или мотопарапланами). Параглайдер, в целом, более близок к МДП, чем даже классический мотопланер. Соответственно, аэроплан(самолет) очень сильно отличается от МДП . Основные признаки сходства параглайдера и МДП : 1) балансирный метод управления; 2) нежесткое крыло (у МДП - полужесткое с каркасом, у параглайдера - полностью гибкое без каркаса); 3) мототележка с винтомоторной установкой, способная менять ориентацию относительно крыла; 4) очень низкий расход горючего на час полета; 5) простота конструкции, низкая цена изделия и низкие эксплоатационные расходы. МДП ненамного дороже и сложнее, чем параглайдер, но заметно превосходит его: 1) по крейсерской скорости; 2) по аэродинамическому качеству; 3) по запасу динамической устойчивости; 4) по допустимой ветровой нагрузке. Для военного и диверсионно-террористического применения малоразвитыми государствами дрон-МДП лучше подходит, чем дрон-аэроплан, ведь малоразвитые государства, зачастую не в состоянии ни производить, ни эксплоатировать любую мало-мальски сложную технику. Особенно выгоден и удобен дрон-МДП для изготовления,продажи,эксплоатации отдельными субъектами и небольшими сообществами(неформалами). Дрон-МДП более устойчив в функционировании, чем дрон-параглайдер, при такой пикантной ситуации, как использование противником активных помех. При наличии инерциальной навигационной системы(ИНС), время автономной ее работы - весьма и весьма существенный фактор, сильно влияющий на точность ее показаний. Значит, траекторная ошибка дрона обратно пропорциональна его крейсерской скорости, при отказе других навигационных систем. Хотя, само-собой разумеется, что замена УАБ на УР класса "воздух-земля", полностью нивелирует различие скоростей носителей, все же это не есть панацея. Ведь пуск и разгонная часть полёта ракеты(подразумевается аэробаллистическая УР типа "СРЭМ") легко отслеживается в ИК-диапазоне ЭМВ, тем самым она заметно демаскирует коридор своей подлётной траектории и затем её можно уничтожить каким-нибудь комплексом скорострельной зенитной артиллерии типа ЗАК "Вулкан-Фаланкс", "Голкипер", etc. (желательно с оптико-электронным каналом целеуказания) . А вот планирующие или корректируемые УАБ очень трудно засечь и отследить в их полете (некоторые планирующие УАБ даже выполняют с использованием компоновочной аэродинамической схемы типы "кольцевое крыло" - для снижения ЭПР в боковой проекции крыла (если относительно корпуса УАБ, то в передней проекции) ). Далее приводятся некоторые данные по нескольким дронам-параглайдерам(дронам-мотопарапланам). 1. Тяжелый дрон-мотопараплан фирмы "Atair" (США) . Название - "LEAPP тип 1" (Long Endurance Autonomous Powered Paraglider, т.е. мотопараплан длительного полета первого типа); Назначение - разведка, наблюдение, рекогносцировка, доставка грузов; Обслуж. персонал - 2 чел. ; Транспортировка - джип с прицепом; Крыло параплана - 112 фута, т.е 34 м (размах) , отн. удлинение - 6; Взлетная площадка - 150 кв. фута (15 кв. м); Длина разбега, макс. - 100 фута (30 м); Режимы управления - автономный и дистанционный по бортовой телекамере; Масса полезной нагрузки - 250 фунтов (110 кг); Макс. длит. полета с макс. нагр. - 48...55 ч; Масса горючего для макс. полета - 2145 фунта (970 кг); Длина мототележки - 105 дюймов (2.67 м); Ширина мототележки - 82 дюйма (2.08) м; Высота мототележки - 95 дюйма (2.41) м; Макс. потолок - 52000 фута (15600 м) . 2. Средний дрон-мотопараплан фирмы "Atair" . Название - "Insect LEAPP тип 2" (Long Endurance Autonomous Powered Paraglider, т.е. мотопараплан длительного полета второго типа); Назначение - разведка, наблюдение, рекогносцировка, доставка грузов; Обслуж. персонал - 2 чел. ; Транспортировка - джип; Крыло параплана - 65 фута, т.е 19.5 м (размах) , отн. удлинение - 6; Взлетная площадка - 150 кв. фута, т.е. 15 кв. м; Длина разбега, макс. - 30...60 фута (9...18 м); Режимы управления - автономный и дистанционный по бортовой телекамере; Масса полезной нагрузки - 200 фунта (90 кг); Макс. длит. полета с макс. нагр. - 35 ч; Масса горючего для макс. полета - 400 фунта (180 кг); Длина мототележки - 70 дюймов (1.8 м); Ширина мототележки - 54 дюйма (1.37 м); Высота мототележки - 60 дюйма (1.52 м); Макс. потолок - 17000 фута (5100 м); Взлетный вес - 1200 фунта (540 кг); Мощность(тип мотора) - 55 л.с. (2-тактный фирмы Ротакс) . 3. Легкий дрон-мотопараплан фирмы "Atair" . Название - "Micro LEAPP тип 3" (Long Endurance Autonomous Powered Paraglider, т.е. мотопараплан длительного полета третьего типа); Назначение - разведка, наблюдение, рекогносцировка; Крыло параплана - 85 кв.фута, т.е 8.5 кв.м (размах) , отн. удлинение - 4; Взлетная площадка - 20 кв. фута, т.е. 2 кв. м; Длина разбега, макс. - 5...10 фута (1,5...3 м); Режимы управления - автономный и дистанционный по бортовой телекамере; Масса полезной нагрузки - 30 фунтов (13.5 кг); Макс. длит. полета с макс. нагр. - 4 ч; Длина мототележки - 40 дюймов (1 м); Ширина мототележки - 25 дюймов (0.64 м); Высота мототележки - 30 дюймов (0.76 м); Макс. потолок - 12000 футов (3600 м); Мощность(тип мотора) - 8 л.с. (2-тактный бензиновый ДВС) . Исходное описание с вэб-сайта производителя("Atair") 4. Легкий дрон-мотопараплан фирмы "ABS Aerolight" (Франция) . Название - "SUSI"; Назначение - разведка, наблюдение, рекогносцировка; Конструкция мототележки - легкий трубчатый каркас с тремя колесами с пневматиками(колесными баллонами) низкого давления; Двигатель(мощность) - 2-тактный (4.2 кВт (6,3 л.с.) ); Аппаратура разведывательная - бытовая цифровая фотокамера Sony DSC R1 на гиростабилизированной по вертикали платформе на кардановом подвесе; Площадь крыла - 3,8 кв.м; Режим управления - дистанционный по текущему положению дрона на цифровой карте на наземной станции(лэптопе); Масса - 5 кг; Масс полезной нагрузки - 5 кг; Скорость - 0...8 м/сек (0...30 км/час); Длительность полета, макс. - 140 мин; 5. Тяжелый дрон-мотопараплан фирмы "FLYING ROBOTS" (Франция) . Название - "FR 102 System"; Назначение - разведка, наблюдение, рекогносцировка, доставка грузов; Взлетная масса, макс. - 600 кг; Масса полезной нагрузки, макс. - 250 кг; Объем полезной нагрузки, макс. - 1 куб.м; Крейсерская скорость - 80 км/час; Макс. потолок - 4000 м; Макс. длит. полета с макс. нагр. - 24 ч; Радиус зоны патрулирования, макс. - 150 км; Дальность полета, макс. - 1000 км; Режимы управления - автономный и дистанционный по бортовой телекамере на расстоянии до 100 км - по радиопередатчику свыше 100 км - через спутник; Сигнал с бортовой телекамеры - реального времени, до 60 км с задержками, свыше 60 км; Архитектура бортовой аппаратуры - на основе персональной ЭВМ; Бортовая электросеть - 24 Вольт, 1 кВт; Двигатель - "Rotax 912", S 100 BHP; Длина разбега - 60...250 м, в зависимости от нагрузки и ветра; Длина пробега - 50 м; Цена в рознице, примерная минимальная - 90000 евро. Исходное описание с вэб-сайта реселлеров-девелоперов("Paraddax","Data-Tools") Дроны-мотопарапланы от фирмы "Atair" - заведомо двойного назначения. Они закупаются Пентагоновским департаментом ДАРПА. Скорее всего их почти невозможно купить в рознице. И сама фирма "Atair" - аэрокосмическая, сильно милитаризовано-профилирована, ведущая разработки для военных. Дроны-мотопарапланы от французских производителей, вероятно, возможно купить в рознице, но они стоят весьма недёшево(например "FLYING ROBOTS" закуплен такой небедной компанией, как "ГазПром_Аэрокосмос"), и также используются военными(жандармерией,таможней,береговой охраной,спецслужбами); само собой разумеется, что исходники их штатного софта не купишь. А это значит, что нельзя получить полный контроль над таким дроном. Такая ситуация неприемлема для любого серъезного пользователя-эксплоатанта(потребителя). Изображение(вероятно нарисовано в какой-то CAD-системе) дрона-параглайдера марки "FR 102 System" от фирмы "FLYING ROBOTS" (Франция) :
 Фотография посадки(приземления) дрона-параглайдера марки "FR 102 System" :
Фотография посадки(приземления) дрона-параглайдера марки "FR 102 System" :
 Фотография взлёта дрона-параглайдера марки "FR 102 System" :
Фотография взлёта дрона-параглайдера марки "FR 102 System" :
 Фотография специализированой наземной станции управления
(по английски Special Ground Station) дрона-параглайдера
марки "FR 102 System" и пользователей(включая оператора),
обратите внимание на одежду оператора :) ; и обратите
внимание на то, что физиономии пользователей и оператора -
- заретушированы :)...
Фотография специализированой наземной станции управления
(по английски Special Ground Station) дрона-параглайдера
марки "FR 102 System" и пользователей(включая оператора),
обратите внимание на одежду оператора :) ; и обратите
внимание на то, что физиономии пользователей и оператора -
- заретушированы :)...
 Фотография дрона-параглайдера марки "SUSI"
от фирмы "ABS Aerolight" (Франция) :
Фотография дрона-параглайдера марки "SUSI"
от фирмы "ABS Aerolight" (Франция) :
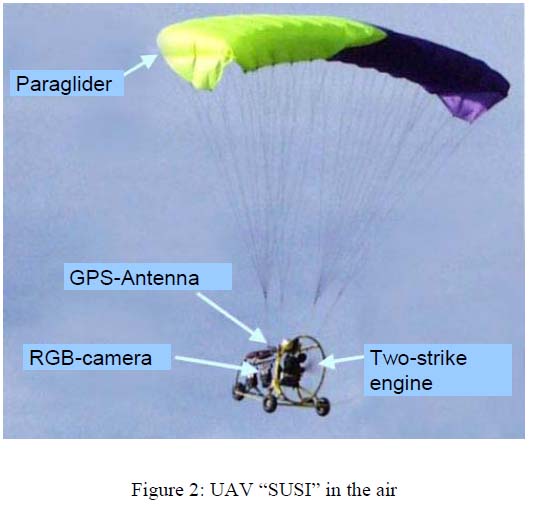 Фотография современного одноместного
пилотируемого МДП "Cosmos" :
Фотография современного одноместного
пилотируемого МДП "Cosmos" :

в начало страницы в начало страницы
5. ОЖИДАЕМЫЕ ИЗМЕНЕНИЯ В СЕРИЙНЫХ ВЕРСИЯХ В серийных изделиях "Шахид-1" будут изменения и дополнения относительно опытно-экспериментального изделия. Эти изменения и дополнения частично были также рассмотрены в предыдущих разделах, здесь они дополнены. 5.1. ИЗМЕНЕНИЯ И ДОПОЛНЕНИЯ В БОРТОВЫХ СЕРВОУСТРОЙСТВАХ Будет добавлен контур управления по каналу крена - два сервопривода, добавочные элементы в модуле драйверов бортовых сервоприводов и необходимый софт. В результате будет полностью и сразу компенсироваться креновый момент при плоском развороте и вираже, а также будут доступны правильные развороты и виражи, и не будет голландского шага. Будет изменен сервопривод контроллера марщевого мотора, вместо четырех электромагнитов и рычажного механизма, будет один шаговый электромотор c его контроллером. Соответственно будет изменен софт("виртуальный_пилот"). 5.2. ПРОСТАЯ, ДЕШЕВАЯ СИСТЕМА ЛОКАЛЬНОГО ДИСТАНЦИОННОГО ДИСКРЕТНОГО РАДИОУПРАВЛЕНИЯ Будет добавлена система дистанционного радиоуправления бортовыми сервоприводами(СДУ). СДУ будет сделана на базе радиотелефона(например сотового) и будет штатно действовать в районе взлета и в районе посадки, но может применяться, вообще-то, в любой точке траектории, где соответственно есть ретрансляторы сотовой радиосети(если используются сотовые радиотелефоны) и, если у оператора есть что-то типа бинокля(для дальнего визуального контроля). СДУ будет дискретного типа. Применять СДУ непрерывного типа(т.н. аппаратуру пропорционального управления и(или) режим полуавтоматического управления) не имеет смысла, поскольку спектр собственных частот САУ(если разложить в ряд Фурье решение дифференциального уравнения аналитической модели САУ) будет достаточно низкочастотным, а значит человек-оператор легко сможет управлять Щахидом обходясь небольшим числом прямых команд(полностью ручное управление), не используя полуавтоматический режим(классическое пропорциональное управление в принципе невозможно, т.к. органы управления дискретные). Команды управления - семибитовые. Четыре разряда команды - информационные (соответственно возможно до 16 команд). Три разряда - избыточная часть команды. В итоге будет получен корректирующий помехоустойчивый код Хэмминга 7.4 , он обнаруживает две ошибки и исправляет одну. На звуковой вход радиотелефона будет подаваться проманипулированный по частоте сигнал звуковой частоты речевого поддиапазона, т.е. его частоты от сотни Герц до четырех...пяти килоГерц. Манипуляция производится по дискретному коду команды. Сигнал звуковой частоты вырабатывается генератором. Генератор - внутренний ШИМ-модулятор однокристального контроллера(ОМК), либо его внутренний программируемый генератор меандра (в атмеге есть и то и то). Например, "0" - гармоника с частотой 700 Герц, "1" - гармоника с частотой 1100 Герц. Кодек - кнопочная панель и электронная схема, содержащая однокристальный контроллер(ОМК), например "ATmega-8" или "ATmega-16" . ОМК считывает биты от кнопок напрямую через свои порты (каждая кнопка сидит на отдельном разряде порта). ОМК определяет кнопку, определяет код текущей нажатой кнопки, вычисляет код Хэмминга, и затем начинает своим ШИМ-модулятором (или проще - своим программируемым генератором меандра) выдавать манипулированную пачку, соответствующую вычисленному коду Хэмминга. Цифровая пачка поступает токовый согласователь (усилитель по току - схема с ОК) с него на звуковой вход радиотелефона. При этом ОМК отслеживает конфликты по своим входам типа "одновременно две кнопки нажаты", итого на выходе радиотелефона(например сотового) получаем СВЧ-сигнал промодулированный сигналом звуковой частоты, в свою очередь звуковой сигнал также проманипулирован по двум звуковым(речевым) частотам и кодирован кодом Хэмминга(содержит его). Необходимости в старт-стопах не будет, т.к. при начале взлета или посадки, приемный ОМК, по первой "осмысленной" полученной пачке определит начало сеанса посылки и автоматически синхронизирует циклы приема. На борту Шахида - радиоприемник из такого же сотового радиотелефона, деманипулятор и декодер. Деманипулятор - электронная схема из звукового ФНЧ(если ОМК без АЦП) и ОМК(та же "ATmega-8", не помню, есть ли встроенный АЦП в восьмой атмеге, если там его нет, то лучше подойдет шестнадцатая, т.к. там он точно есть, если будет в продаже "dsPIC", то лучше подойдет он, поскольку в нем полностью аппаратно реализованная арифметика с плавающей точкой). Декодер - функция, выполняемая ОМК, т.е. декодер и деманипулятор физически реализованы в ОМК. Радиотелефон принимает проманипулированную звуковую поднесущую, через ФНЧ(если ОМК без АЦП) сигнал приходит на компараторный вход встроенного аналогового компаратора ОМК (либо можно проще - использовать вход с ТШ). ОМК по прерыванию от своего компаратора фиксирует моменты прихода фронтов по своим часам реального времени(в нем есть встроенный генератор, кварцованный внешним кварцем(и даже есть внутренний стабильный генератор), и счетчик-таймер), т.е. ОМК выполняет функцию программно реализованного частотомера. Если используется ОМК с внутренним АЦП, то внешний ФНЧ не нужен, и ОМК будет делать цифровую фильтрацию оцифрованного сигнала(должен успеть, т.к. частоты низкие) - полосовые фильтры соответственно на 700 и 1100 Герц, фильтры могут быть, например, рекурсивными. Еще раз повторю, что желателен 16-разрядный ОМК с аппаратно реализованной арифметикой с плавающей точкой, например "dsPIC" . Приняв очередную команду СДУ, ОМК производит ее декодирование по Хэммингу, определяет и исправляет ошибку(если одна), определяет две ошибки и игнорирует команду, т.к. не может исправить больше олной ошибки. Четырехбитовый код команды СДУ передается от ОМК на LPT-порт лэптопа. Лэптоп(работающий под управлением штатного софта), обнаружив команду СДУ, через другие разряды LPT-порта формирует позиционный параллельный код команды в регистре сдвига модуля драйверов бортовых сервоприводов, и на соответствующем выходе этого модуля возникает силовое напряжение, которое активирует соответствующий электромагнит. Как следует из описания, в СДУ будет применено двойное преобразование, будет производится частотная манипуляция(ЧМ), а манипуляция будет при этом выполняться по текущему коду (полному коду по "Хэммингу (7.4)" текущей нажатой кнопки) - ИКМ, итого, это двойное преобразование относится к преобразованию вида "ЧМ+ИКМ" . Само собой разумеется, что выщеописанная СДУ может управлять, также целевыми сервоустройствами, например сервоустройством для сброса авиабомбы, при этом, ширина полосы пропускания радиоканала управления допускает только дискретные команды. 5.3. ИЗМЕНЕНИЕ АППАРАТНОЙ РЕАЛИЗАЦИИ УЭВМ И ПЕРИФЕРИИ Будет устанавливаться лэптоп вместо дэсктопа. То есть УЭВМ будет реализована на лэптопе. Во многих современных лэптопах нет LPT-порта. Нужно будет доукомплектовывать лэптоп покупной платой расширения. Такого вида платы расширения(адаптеры LPT-порта) подсоединяются к внутреннему системному слоту лэптопа(PCMCIA), и через гибкий кабель выводят разъем LPT-порта наружу корпуса лэптопа, разумеется, затем надо инсталлировать драйверы для этой платы расширения. Либо можно будет спроектировать дополнительный адаптер USB-порта. Такой адаптер, проще всего выполняется на базе БИС "FTU245" (from FTDI corp.) . Будет добавлена периферийная плата для реализации магистрали обмена(шины) стандарта RS-485. Тогда можно будет вешать на СОМ-порт немерянное количество различных датчиков и прочих электронных цифровых модулей, разумеется все они должны поддерживать тот же протокол RS-485. Также, повысится помехоустойчивость системы(всего изделия). Соответственно, можно будет переработать модуль драйверов бортовых сервоприводов, он станет локально программноуправляемым - в нем будет локальный ОМК, в том числе, реализующий поддержку протокола RS-485 (RS-485 - интерфейс с одним мастером и множеством слэйвов, которые занимают двухпроводную дифференциальную физическую линию в режиме разделения времени между собой - на более верхнем протоколе ModBus) . Возможно будет полностью изменена бортовая магистраль(шина). Вместо магистралей традиционно используемых в вычислительной технике и промышленной автоматике(RS-232C и RS-485) будет применяться магистраль "CAN" . Как известно, магистраль(шина) CAN стала де-факто стандартом в специальной транспортной технике (авиатехнике, автобронетанковой технике, надводных и подводных кораблях). 5.4. ДУБЛИРУЮЩАЯ СИСТЕМА ТОЧНОЙ НАВИГАЦИИ Будет устанавливаться дублирующая система точной навигации, которая должна обеспечить точное наведение на цель (например для сброса авиабомбы свободного падения (т.е. некорректируемой) и точечного поражения цели при отказе GPS из-за постановки радиопомех, каковая будет почти наверняка производиться противником в комплексе мероприятий объектовой ПВО). Такая дублирующая система навигации состоит из двух подсистем. Первая подсистема - это система "грубой" навигации, она обеспечит вывод в район цели с достаточно большим СКВО (единицы килоиетров). Типовое значение корня квадратного из дисперсии (он и есть СКВО - среднеквадратичное отклонение) координаты на выходе ИНС, выполненной на дешевых инерциальных датчиках(кориолисовы вибрационные пъезогироскопы и вибрационные маятниковые пъезоакселерометры), составляет - километр на десять минут автономной работы ИНС. Компенсирующая обратная связь(то есть учет в подпрограмме обработки значений измерений от датчиков, входящей в общий штатный софт УЭВМ) с использованием контура ОС от термометра(для учета систематической погрешности температурного дрейфа) снизит ошибку ИНС. Либо проще будет сделать термостабилизацию датчиков ИНС. Можно будет выполнить "грубую" подсистему на магнитометрах(измерять углы) и вариометрах вкупе с измерителями скорости(измерять проекции вектора относительной мгновенной воздушной скорости). Дешёвые современные трехосевые микроэлектронные магнитометры (цифровые компасы с поддержкой интерфейса I2C, например от Honeywell corp.) измеряют углы в Земной магнитной системе координат (т.е. относительно магнитного азимута и вектора радиуса Земли) с такой же маленькой погрешностью, как и GPS-приемники, и также принципиально не имеют дрейфа. Цифровые микроэлектронные вариометры и цифровые микроэлектронные указатели скорости(их работа основана на измерении скоростного напора, который является разностью полного напора и статического напора, т.е. первичный измеритель типа трубки Пито) можно дополнить аэролагами и флюггерными измерителями, что скорее всего повысит точность измерения и расчета вектора относительной мгновенной воздушной скорости (в авиации принято называть модуль этого вектора - истинной воздушной скоростью, которая отличается от путевой скорости, выдаваемой GPS-приемником, т.к. путевая скорость - это горизонтальная проекция мгновенной скорости в Земной системе координат, т.е. путевая скорость не учитывает ни ветра, ни вертикальной проекции мгновенной скорости центра масс МДП). Вектор средней скорости ветра будет известен на основании предшествующих вычислений с учетом высокоточных значений кинематики от GPS(до того, как ее заглушат искусственными помехами на некотором расстоянии до цели), и он с высокой вероятностью не будет сколько-нибудь заметно изменяться в пределах тех же десяти минут. Вторая подсистема - это система точной навигации(точность определения ею координат - такие же как у GPS). Эта система - что-то подобное DSMAC(используется в изделии AGM-86С "CALCM" и ранее испытывалось, на древней элементной базе, в КР "Мейс" - передающие телевизионные трубки и аналоговые корреляторы), но дополненная : 1) позиционированием не только в видимом диапазоне, но и в диапазонах ИК и УФ (поскольку любая серъезная цель маскируется); 2) гиростабилизированной платформой (на которой устанавливается вышеуказанная мультиспектральная телекамера(видеокамера) ) , поскольку высота сброса авиабомбы свободного падения может быть достаточно большой, а значит угловая погрешность будет порождать неприемлемые линейные погрешности . 5.5. ОБРАТНАЯ СВЯЗЬ ПО ОТНОСИТЕЛЬНОЙ ВОЗДУШНОЙ СКОРОСТИ И ЧАСТОТЕ ВРАЩЕНИЯ ПРОПЕЛЛЕРА Возможно, что будет добавлена обратная связь по вектору относительной воздушной скорости. Как известно, вектор полной аэродинамической силы(имеется в виду крыло) зависит от : 1) аэродинамического коэффициента (а он зависит от: профиля, угла атаки, угла скольжения) ; 2) квадрата относительной воздушной скорости ; 3) направления вектора относительной воздушной скорости (в связанной системе координат) ; и таким образом, качество САУ будет несколько выше(насколько?) . Выдерживание программной высоты будет производится с несколько меньшей постоянной времени, но при этом потребуется задействовать контур управления по углу атаки крыла не только при взлете и наборе высоты, но и при остальном полете. Если добавить к бортовым датчикам тахометр, то можно соответственно ввести обратную связь по силе тяги (вычислением ее по значению частоты вращения пропеллера), что также несколько снизит постоянную времени переходного процесса изменения высоты полета. 5.6. ОРИЕНТИРОВОЧНЫЕ ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ (ЛТХ) СЕРИЙНЫХ РЕАЛИЗАЦИЙ Серийные реализации(версии) изделия "Шахид-1" будут иметь различные ЛТХ. Конкретные значения ЛТХ будут определяться заказчиком. Максимальные значения основных ЛТХ, при использовании дорогих : материалов, покупных_деталей, покупных_узлов, покупных_агрегатов будут примерно следующими : 1. Статический потолок ---------------------------------------------------- 8000 метров 2. Крейсерская скорость --------------------------------------------------- 140 км/час 3. Перегоночная дальность ------------------------------------------------- 1000...1200 км 4. Максимальная масса полезной нагрузки ----------------------------------- 300 кг 5. Максимальная длительность полета полета с полезной нагрузкой в 50 кг --- 8...10 часов 6. Максимальное аэродинамическое качество --------------------------------- 18 Основные дорогие покупные комплектующие и материалы : 1) мотоагрегат с турбонаддувом (от микролитражки); 2) эпоксидные смолы и др. компоненты для приготовления клея; 3) углеткань; 4) дакрон(ткань); 5) литий-полимерные аккумуляторы . 5.7. ПРИМЕНЕНИЕ СПУТНИКОВОГО МОДЕМА И ПРИМЕНЕНИЕ УДАЛЕННОЙ ЗАЩИЩЕННОЙ СДУ Будут добавляться все прочие бортовые системы по заказу потребителя. Разумеется, что цена изделия(Шахида) будет соответственно расти. Если рассматривать Шахид как систему, то (отмечу в очередной раз) архитектура его системы абсолютно : a) открытая; б) модульная; в) масштабируемая; г) гибкая; д) перестраиваемая. Например, для реализации функции дальнего (за пределами дальности) радиоканала управления посредством аренды радиоканала на спутнике-ретрансляторе(коммуникационном саттелите), нужно будет установить на Шахиде спутниковый цифровой радиомодем(подойдет самый низкоскоростной, но разумеется он должен обеспечивать дуплексность либо полудуплексность), разработать адаптер для его согласования с портом УЭВМ (хотя, скорее всего такие модемы подсоединяются к RS-232C или USB(BlueTooth), или же реализованы в виде платы вставляемой в системный слот стандарта PCI, PCMCIA), доработать софт наземной станции (ground station, само собой разумеется, что на базе "виртуального_штабиста" - добавить функции динамического изменения программной траектории, добавить функции соединения(создание сокета) по IP-адресу и т.д.). И в целом рационально использовать Интернет-технологии(софтвэр,хардвэр,инфраструктуру), поскольку развитие последних полстолетия постоянно доказывает, что различные отрасли(телекоммуникации,транспорт, промышленность и т.д.) постоянно "пропитываются" всемирной паутиной, хотя эти отрасли вначале и пытались "городить свой огород". Если будет потребность в "картинке" в реальном(или с малыми задержками) времени, то ширина полосы пропускания спутникового канала должна быть приличной(например у "Глоубэл Хоук" она достигает ста Мбит/сек). Или, например, можно будет использовать более сложные корректирующие помехоустойчивые избыточные коды, например код Рида-Соломона. Любой лэптоп справится с функцией кодека для любого самого современного избыточного кода. Само-собой разумеется, что будет выполняться также кодирование увеличивающее энтропию (типа кодирование по Шэннону) - для снижения информационной избыточности сообщений (заодно повысится криптостойкость, и возможно отпадет необходимость в отдельном криптошифровании типа шифрования с открытым ключом типа RSA и прочих, применяемых в протоколах SSL). Поскольку спектр собственных частот Шахида(как автоматической системы) весьма узок, то помехоустойчивое кодирование (для приема-передачи навигации и дополнительной кинематики) может быть очень и очень избыточным, а значит можно обеспечить очень высокую помехоустойчивость и криптозащищенность канала приема-передачи : навигации, кинематической информации, команд управления и шпионской инфы. Та же теорема Шэннона, так сказать, это гарантирует. Или, например, можно будет установить на Шахиде приемо-передающую антенну с высоким КНД, т.е. узкой ДН, например зеркальную параболическую поворачиваемую(желательно и по азимуту, и по углу места) антенну на стабилизированной платформе. При создании кем-то(чем-то) искусственных (естественных) радиопомех, и вообще на больших удалениях от ground station, такая антенна(а фактически радиотехническая система, вкючающая эту антенну) повысит устойчивость всей системы, а также даст возможность уничтожать не только фиксированные цели, но и мобильные(опять-таки должна быть хотя бы монохромная телекамера на борту). Что интересно, противник должен будет использовать постановщик помех(станцию постановки помех) обязательно воздушного базирования и причем с всенаправленным(по азимуту) излучением помеховых сигналов, так как наземная станция постановки радиопомех имеет меньшую дальность, и противник не имеет информации об координатах ground station (запеленговать ее очень непросто, если она использует приемопередающую антенну с, например, игольчатой ДН, и циклы приема/передачи изменяются по какому-то алгоритму с прекращением излучения сигнала). Можно применять более широкополосные сигналы(например шумоподобные) - для повышения помехоустойчивости, применять более современные ортогональные функции(например Уолша) - для повышения криптостойкости, но это сильно удорожит аппаратуру. Можно применять СДУ на базе сотового радиотелефона(или сотового радиомодема) и за пределами визуального контроля, если есть соответствующая инфраструктура сотовой радиосети. Само-собой разумеется, что радиоканал должен быть дуплексным(или полудуплексным). Потребная ширина полосы пропускания радиоканала составит не более нескольких килобит в секунду, т.е. подойдет любой сотовый радиотелефон или сотовый радиомодем. Ширина полосы пропускания может быть такой узкой, т.к. спектр собственных частот САУ очень узкий(из-за инерционности объекта управления и дискретности управляющих сигналов) и из-за собственной статической устойчивости МДП(что позволяет передавать на ground station только лишь навигационную инфу и дополнительную кинематику, и не требует передачи на ground station визуальной картинки с бортовой телекамеры). Но надо помнить(при военном или диверсионно-террористическом применении), что противник может легко поставить радиопомехи, и тогда соответственно СДУ откажет. Вероятно, рационально применять для дальней СДУ готовый протокол - протокол DTN from NASA, который оптимизирован для сверхдальнего радиоуправления. Такую работу выполнить несложно, т.к. весь хард имеет совместимые интерфейсы. Еще раз повторю, что добавление новых систем - рутинная процедура!!!
в начало страницы в начало страницы
6. ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ АББРЕВИАТУР, СОКРАЩЕНИЙ И ТЕРМИНОВ Здесь сокращения, аббревиатуры и термины не в алфавитном порядке. ОС - операционная система или обратная связь (в зависимости от контекста); ПО - программное обеспечение; ТЭО - технико-экономическое обоснование; TTL - транзисторно-транзисторная логика; TTЛ - транзисторно-транзисторная логика; ТТЛШ - транзисторно-транзисторная логика с диодами Шоттки; КМДП - комплементарная металл-диэлектрик-полупроводник (структура, технология производства монолитных ИС); ИМС - интегральная микросхема; ЭРЭ - электрорадиоэлемент; УЭВМ - управляющая электронная (цифровая) вычислительная машина; ДЗУ - долговременное запоминающее устройство; ЭСППЗУ - электрически стираемое и перепрограммируемое запоминающее устройство; ВИП - вторичный источник электропитания; ПИП - первичный источник электропитания; ПВ - продолжительность включения; GPS - global position system, уже существуют ее аналоги : "Галилео"(ЕС), "Глонасс"(РФ), система от КНР, система от Японии); NMEA - national marine electronic association; ANSI - American National Institute of Standarts; NAVSTAR - navigation stars(система орбитальных радиомаяков и наземной аппаратуры для управления ими путем выдачи на них радиокоманд на всякие действия(юстировка, тестирование,коррекция параметров радиопередатчиков,привязка,коррекция траекторий орбит(включением/отключением двигателей коррекции), фазировка и(или) подстройка частот генераторов эталонных частот и т.д.), также какие-то юстировки проводятся посредством излучения лазерного эталонного луча с земли, на некоторых спутниках устанавливается аппаратура регистрации и фиксации гамма-излучения для отслеживания взрывов атомных(водородных) бомб, NAVSTAR является ядром GPS; OSI - open system interface - стандарт для систематизации протоколов внутрисетевого обмена; СБИС - сверхбольшая интегральная схема; БРЭО - бортовое радиоэлектронное оборудование; ОМК - однокристальный микроконтроллер; ПЗУ - постоянное запоминающее устройство; САУ - система автоматического управления; САР - система автоматического регулирования; ПНК - пилотажно-навигационный комплекс, в данном документе под этим термином подразумевается более-менее современный ПНК, то есть тот, который содержит устройство для автоматического пилотирования (автопилот) и устройство для автоматической навигации; СДУ - система дистанционного управления; ТТХ - тактико-технические характеристики; ЛТХ - летно-технические характеристики; ТАУ - теория автоматического управления; ТАР - теория автоматического регулирования; СКВО - среднеквадратичное отклонение; ЛА - летательный аппарат; ПВД - приемник воздушного давления; ТШ - триггер Шмитта; АЦП - аналогоцифровой преобразователь; ШИМ - широтно-импульсная модуляция; ШИУ - широтно-импульсное управление(регулирование); ЧМ - частотная манипуляция(модуляция); ИКМ - импульсно-кодовая модуляция; ПИД - пропорционально интегрально дифференциальный (закон автоматического регулирования, для линейных или линеаризованных САР); ВЦ - входная цепь; УРЧ - усилитель радиочастоты; УПЧ - усилитель промежуточной частоты; DSP - digital signal proccessor; PC - personal computer; USB - universal serial bus; PLC - programming logical controller; БМК - базовый матричный кристалл; ПЛМ - программируемая логическая матрица; ПЛИС - программируемая логическая интегральная схема; ИСЗ - искусственный спутник земли; РЛС - радиолокационная станция; ЕСКД - единая система конструкторской документации; ЕСТД - единая система технологической документации; ЭПР - эффективная площадь рассеивания (в данном контексте - электромагнитных волн радиодиапазона (он, начиная от СДВ и до КВЧ)) цели, строго говоря, следует применять термин ЭОП(эффективная отражающая площадь) цели; ДП - дельтаплан; МДП - мотодельтаплан; ИНС - инерциальная навигационная система; ИСС - инерциальная система стабилизации, отличается от ИНС тем, что не измеряет линейные параметры, а измеряет лишь угловые, и включает в себя основной контур стабилизации ориентации(платформы,ЛА) - бортовые сервоприводы; РНС - радионавигационная система; ДУС - датчик угловой скорости, современные ДУСы обычно выполняются на базе кориолисовых вибрационных пъезогироскопов; при наличии на борту дрона ИНС, надобность в ДУСах отпадает, т.к. ИНС выдаёт требуемые угловые параметры (углы - интегрируя угловую_скорость, угловые_скорости, угловые_ускорения - дифференцируя угловые_скорости) если используется более дорогой и громоздкий астатический гироскоп(у которого выходной параметр угол), то ДУСом является величина на выходе дифференциатора; ВПП - взлетно-посадочная полоса; ЭРЭ - электро радио элемент(ы); дрон - беспилотная(точнее говоря безэкипажная) воздухоплавательная машина, могущая совершать перемещения в воздушном океане в автоматическом режиме(без людей), но иногда под этим термином также подразумевается машина управляемая посредством радиоволн, и тогда соответственно необходим радиооператор-пилот(на земле), дроны изготавливаются, как правило, на базе некой платформы, а в качестве платформы используется тот или иной летательный аппарат, соответственно, можно классифицировать дроны по типу используемой воздухоплавательной машины(дрон-аэроплан, дрон-дирижабль, дрон-геликоптер), но не принято относить к дронам безэкипажные летательные аппараты на базе ракет, по причине(вероятной) редкости ракет с экипажами(хотя была ракета с сукой, а потом была ракета с Гагариным); робот - автоматическая машина, т.е. машина, могущая совершать требуемые операции без участия человека; манипулятор - машина могущая совершать требуемые операции только при получении воздействий по каналам передачи информации,энергии,вещества, каналы по которым передаются воздействия, называются телемеханическими каналами, каналы по которым передается информация, называются телеметрическими каналами; сетецентри- ческая кон- цепция - новомодная парадигма, "разработанная" военными аналитиками из США, в этой концепции, предлагается создавать распределенные в пространстве системы вооружений вместо одного супер-объекта, оборудованного множеством систем, такую концепцию изложили фантасты(они же футурологи) еще в начале 50-х, ДАРПа разработала Интернет на основе этой же концепции, кстати, ДАРПа проектирует по этой концепции облака из дешевых дронов-параглайдеров; ДАРПА - подразделение Пентагона, занимающееся аналитикой, выдачей ТЗ на разработку, разработкой(на уровне предварительного эскизного проектирования) перспективных вооружений, систем вооружений, систем связи, систем навигации, систем стандартизации в военной промышленности; CAD - computer aid design; УР - управляемая ракета, это : либо автоматическая ракета, то есть способная самостоятельно без дополнительной информации от человека, выполнять перемещение по определенной траектории; либо дистанционно управляемая ракета, то есть перемещающаяся в пространстве на основе информации от земного человека; УР применяют в основном в военнои деле, применительно к изделию "Шахид-1" имеем дело с УР класса "воздух-земля" и "воздух-воздух"; УР класса "воздух-воздух" различаются по дальности (Сайдуиндер - ближнии, Спэрроу - средние, Феникс - дальние), часто УР класса "воздух-воздух" получают посредством модификации УР "земля-воздух"(зенитной) или наоборот (Sparrow <-> Standart Missile), иногда просто вешают на аэроплан зенитную ракету, не заморачиваюсь с доработкой(Stinger); УР "воздух-земля", также различаются по дальности, и также зачастую выполняются на основе ПТУРС (Hellfire), либо путем модернизации НУРС (DAGR), применительно к изделию "Шахид-1" существуют две важные тенденции: Hellfire становятся всеракурсными, то есть можно хуярить Путина и его отродье на отходе, а кроме того, уже появились УР "воздух-земля" сверхлегкого класса (масса до 10 килограмм) - для спецназа и террористов, но там надо мочить наверняка, ведь ее боевая часть(БЧ) с маленьким радиусом смертоубийства; БПЛА - беспилотный летательный аппарат, эквивалент дрона, частный вид транспортного аэромеханического робота; БЛА - так иногда называют БПЛА(см. выше); ДПЛА - дистанционно пилотируемый летательный, эквивалент дрона, частный вид транспортного аэромеханического(по среде перемещения) манипулятора; ПТУРС - противотанковый управляемый реактивный снаряд, например "Тоу" , "Фагот" , "Билл" , и прочие, такие изделия производят начиная с начала 60-х, они уже классифицируются по поколениям, самого последнего поколения оснащены системами искусственного интеллекта и реализуют концепцию "выстрелил и забыл"(то есть полностью самонаводящиеся по нечетким сигнатурам и высокопомехоустойчивые для активных помех), но что немаловажно, они оснащены электромагнитными приводами рулей(а им ведь надо воткнуться в площадку размером в 1 квадратный метр - уязвимое место у танка лишь часть его внешней поверхности - как правило крыша башни и крыша моторного отсека); ракета - транспортная машина, могущая совершать перемещения в безвоздушном пространстве(вакууме), поскольку она перемещается в основном за счет использования закона сохранения импульса(реактивной силы в замкнутой механической системе), но вот уже более полувека, как этот термин применяют для дронов с воздушно реактивными моторами (что, безусловно является нелепицей, так как воздушно реактивный мотор(например ПуВРД, используемый в ФАУ-1), функционируя в атмосфере(из нее он сосет кислород и азот и тем самым рабочее тело он может почти "не таскать" с собой), принципиально существенно взаимодействует с атмосферой, а значит механическая система является существенно незамкнутой), также, само-собой разумеется, что два слова "крылатая ракета" - бессмысленный термин, когнитивно идентичный термину "проволочная радиостанция", вероятно, гэбня специально культивирует термин "крылатая ракета", поскольку невозможно доебаться до неформалов, делающих самолёт(БПЛА), а вот пришить статью "Пособничеству Терроризму" намного легче любителям-ракетчикам; УАБ - управляемая авиабомба (обычно самонаводящаяся, например GBU-38), это авиабомба оборудованная аэродинамическими рулями и какой-то системой управления(наведения), например с телевизионным самонаведением (посредством телекамеры и коррелятора, иногда аналогового, в современных УАБ она улучшена применением системы распознавания образа-имиджа цели); современные УАБ подразделяются на собственно управляемые и корректируемые, в зависимости от максимально допустимого отдаления точки сброса от точки цели (строго говоря, максимально допустимое горизонтальное отдаление тоже изменяется при изменении высоты точки сброса относительно цели) , также понятно постоянное стремление проектировшиков применять в конструкции УАБ несущие аэродинамические поверхности(крылья) - для увеличения максимально допустимого отдаления, что стирает грань между бомбой и планером; подавляющее большинство современных УАБ используют несколько каналов самонаведения одним из которых является самонаведение посредством информации от ИНС и по периодической коррекции ошибки ИНС по информации от GPS-модуля; ТЕРКОМ - корреляционное самонаведение(точнее определение координатной ошибки ИНС), путем сравнения рельефно-высотной карты, полученной сканированием высокоразрешимым бортовым радиовысотомером(разрешение - до долей метра) и измерением барометрическим высотомером, с эталонной картой(считанной из ПЗУ); КВО - круговое вероятное отклонение(радиус круга, в который артснаряд, авиабомба или боеголовка попадут с вероятностью не ниже 50 процентов); ИЭ - инструкция по эксплоатации; ИН - инструкция по наладке(настройке,регулировке); ТО - техническое описание; ПСП - паспорт; КТД - комплект технической документации; ARF - almost ready to fly; RTF - ready to fly; СЛА - сверхлегкий летательный аппарат.
в начало страницы мотодельтаплан, дельталет, cruise, наркотики, МДП, White House, ДП, дрон, чечен, olympiad, Афганистан, БЛА, беспилотный, Шахид, NMEA, ШАХИД, хуй, параглайдер, Ичкерия, парамотор, пизда, парафойл, картинка, Olympian, фото, cruise, вид, Имарат, внешний, полет, GPS, пуштуны, характеристики, Путин, данные, выгодный, эмир, дешевый, доступный, ислам, Bush, эффективный, террор, ебать, терроризм, самодельный, доступный, моджахед, explosive, сельскохозяйственный, изотопы, авиация, любительский, военный, сверхлегкий, Аллах, БПЛА СЛА, ультралайт, ultra light, героин, русская, ultra-light, ultralight, Кремль, Коран, Ultra Light, Сочи, plane, талибан, выебу, airplane, Людмилу, kill, Олимпиада, paraglider, UltraLight, жопу, дельтаплан, drone, террорист, UAV, Путину, robot, Сочи-2014, bomb, яды, fuck, параплан, сибирская язва, Sochi-2014, Sochi, Бочаров Ручей, навигация, Доку Умаров в начало страницы
7. ПИСЬМА В РАЗЛИЧНЫЕ КОНТОРЫ ПО ПОВОДУ И СВЯЗАННЫЕ С ИЗДЕЛИЕМ И ВСЕМ ПРОЕКТОМ -------2009---------- Письма в: Минобороны КР, Госбезопасность КР, МВД КР, Минсельхоз КР в Бишкеке, апрель 2009; Министерство Чрезвычайных Ситуаций КР (июль 2009) . -------2010---------- Письмо в ФСО РФ,ФСБ РФ январь 2010 . Письмо в консульство США(с просьбой о пересылке его в ФБР) в Бишкеке, январь 2010 . Письмо в консульство ФРГ в Бишкеке, январь 2010 . Письмо в консульство Израиля в Астане, январь 2010 . -------2011---------- Письмо в Госбезопасность, Минобороны КР в Бишкеке, март 2011 . Письмо в Минэкономрегулирования КР в Бишкеке, март 2011 . Ответ из Минэкономрегулирования КР в Бишкеке, апрель 2011 . Письмо в Минобороны КР в Бишкеке, май 2011 . Письмо в Минтранс КР в Бишкеке, май 2011 . Ответ из МО КР в Бишкеке, май 2011 . Письмо в Центр Информтехнологий в Алматы, май 2011 . Ответ из приемной Президента КР в Бишкеке, август 2011 . Письмо Премьер-Министру КР Атамбаеву, август 2011 . Письмо Президенту КР Отунбаевой, август 2011 . Письмо в Институт Стратегических Исследований, август 2011 . Ответ из Минобороны КР в Бишкеке, сентябрь 2011 . Письмо Президенту КР Отунбаевой, сентябрь 2011 . Письмо в GIZ, сентябрь 2011 . Ответ из GIZ, ноябрь 2011 . -------2012---------- Письмо в бишкекский Технопарк при Академии Наук, февраль 2012 . Письмо в ЖК КР(комитет по обороне и без-сти), март 2012 . Письмо в МинПромЭнерго, март 2012 . Письмо в ОАО "ТНК "Дастан", март 2012 . Ответ из МинПромЭнерго, апрель 2012 . Письмо в МинПромЭнерго, апрель 2012 . Письмо в адрес депутата ЖК КР Калматова, май 2012 . Письма в адрес депутатов ЖК КР Гусарова, Ниязалиевой ; май 2012 . Письма в адрес депутатов ЖК КР Домашенко, Карамушкиной ; май 2012 . Письмо в адрес руководства партии "Республика" , май 2012 . Письмо в Минобороны КР , май 2012 . Письмо Премьеру Бабанову , май 2012 . Письмо Генпрокурорше Саляновой , май 2012 . Письмо Атанбаеву , май 2012 . Письмо в Комитет по Бюджету ЖК КР , май 2012 . Письмо в адрес депутата ЖК КР Калматова , июнь 2012 . -------2013---------- Письмо Премьер-Министру КР Сатыбалдиеву , январь 2013 . Письмо в Министерство Транспорта и Коммуникаций , март 2013 . Письмо Премьер-министру КР Сатыбалдиеву , 1 апреля 2013 . Письмо в Агентство Гражданской Авиации , апрель 2013 . Письмо Премьер-министру КР Сатыбалдиеву , апрель 2013 . Письмо в адрес депутата ЖК КР Калматова, апрель 2013 . Письмо Премьер-министру КР Сатыбалдиеву , от 17 апреля 2013 . Письмо в ЖК КР(комитет по обороне и без-сти) #1, апрель 2013 . Письмо в ЖК КР(комитет по обороне и без-сти) #2, апрель 2013 . На почти все письма есть доказательства их получения адресатом. Со всеми вытекающими из этого последствиями. Например, местную чучмечную башкарму будут ебать в жопу и рот ихнии конкуренты, которые пока только слушают сказки про всякие инновации-менструации, но потом начнут спрашивать у этих абызян из Белого Дома : "Гидэ бэспылотныкы ?..." :) . Также есть еше кое-какие юридически действенные документы, способные дискредитировать любые возможные обвинения в пособничестве терроризму(само-собой разумеется, что все вышеуказанные письма предназначены для этого...) . Можно уже подводить дополнительные результаты косвенных экспериментов, ведь как говаривал бездельник-тунеядец Карл Маркс(который, как известно паразитировал на своём кореше Фридрихе Энгельсе :) ) : "Практика - критерий истины"(с) . Перечень пидарасов,гандонов,казлов,долбоёбов,сучек,говнюков и демагогов, которые к тому же чиновники-паразиты на госказне : министры обороны, министры госбезопасности, министры внутренних дел, управляющий от государства "Дастаном", министр экономики, директор технопарка при Академии Наук, министры чрезвычайных ситуаций, Курманбек Бакиев, Роза Отунбаева, Алмазбек Атанбаев, директор института стратегических исследований(сын покойного кинобашкармы), директор GIZ, Гусаров, Ниязалиева, Домашенко, начальник партии "Республика", Бабанов, Салянова, Бусурманкул Табалдиев. Перечень ответственных,добросовестных и порядочных людей : Губарев, Калматов, Карамушкина, Пак(департамент химизации), Орозбеков(Минпром)
в начало страницы мотодельтаплан, дельталет, cruise, наркотики, МДП, White House, ДП, дрон, чечен, olympiad, Афганистан, БЛА, беспилотный, Шахид, NMEA, ШАХИД, хуй, параглайдер, Ичкерия, парамотор, пизда, парафойл, картинка, Olympian, фото, cruise, вид, Имарат, внешний, полет, GPS, пуштуны, характеристики, Путин, данные, выгодный, эмир, дешевый, доступный, ислам, Bush, эффективный, террор, ебать, терроризм, самодельный, доступный, моджахед, explosive, сельскохозяйственный, изотопы, авиация, любительский, военный, сверхлегкий, Аллах, БПЛА СЛА, ультралайт, ultra light, героин, русская, ultra-light, ultralight, Кремль, Коран, Ultra Light, Сочи, plane, талибан, выебу, airplane, Людмилу, kill, Олимпиада, paraglider, UltraLight, жопу, дельтаплан, drone, террорист, UAV, Путину, robot, Сочи-2014, bomb, яды, fuck, параплан, сибирская язва, Sochi-2014, Sochi, Бочаров Ручей, навигация, Доку Умаров в начало страницы
8. НАИБОЛЕЕ ИНТЕРЕСНЫЕ И ВАЖНЫЕ ПРОТОТИПЫ И ТЕНДЕНЦИИ И МОИ(НАШИ) КОММЕНТАРИИ В этом разделе приведены доводы в пользу "Шахид-1" и в контексте технических соображений, и в контексте рыночных доводов, и эти доводы основаны на анализе различных летательных аппаратов и систем, а также на анализе явлений,закономерностей и тенденций в авиации, робототехнике,политике,военном деле,военной промыщленности и прочих существенных аспектах бытия человечества(сорри, за смешную напыщенность окончания этого предложения). Излагаемые доводы не всегда чисто технические, поскольку, в конечном счете организаторам внедрежа придется конкурировать на рынке с легальными брэндовыми производителями и рэселлерами, а значит придется ориентироваться на потребительские свойства продукта и учитывать специфику интересов потребителей, а возможно даже менталитет потребителя, и искать пути отмазки от гэбни, ментов и прочих говнюков. В целом, этот раздел (и весь талмуд) - нудная графоманская хуйня, которую читают только гэбнюки (им некуда деваться, пускай моего гавна похавают, а мы хуй подрочим на портрет Людочки Путыной) ... В этом разделе, цитируемые тексты - темно зеленого цвета курсивом. ----------------- "Беспилотные авиационные системы. Часть 1. Современное состояние" авторы: В.В.Ростопчин, С.С.Румянцев, издательство ООО "Техкомтех", 21 декабря 2002 года : "...В Ираке проводятся интенсивные НИОКР по созданию боевых ударных ДУАС(дистанционно управляемая авиационная система). В 1997 году в авиационной прессе было сообщение о наличии в ВС Ирака беспилотного самолета (BZM-18), созданного на базе сельскохозяйственного самолета польского производства М-18 Дромадер, способного решать широкий круг боевых задач: распыление химических и бактериологических аэрозолей над боевыми порядками противника; тактическая разведка; корректировка действий артиллерии; агитационное воздействие. Развитие этой технологии в Ираке продолжается на самолетах Л-29 чешского производства, снимаемых с эксплуатации после выработки ресурса. ..." Очень интересный факт. Ирак, наполовину разбитый и опутанный санкциями, вел проектирование и изготовление боевых дронов. Ирак не имел ни денег, ни квалифицированных специалистов, в то время не было дешевой и точной GPS, но С.Хусейн совершенно правильно нашел наиболее эффективное решение проблемы оснащения своей разбитой армии хоть какой-то боевой авиационной техникой. Кстати, судя по очень многим сообщениям, с 2007 года американцы стали массово переоборудовать свои истребители-бомбардировщики (сначала F-4 "Фантом-2", затем F-16 "Файтинг Фалкон", F-18 "Хорнет") в ударно-разведывательные дроны, предназначенные в первую очередь для прорыва ПВО и демаскировки и уничтожения его сил и средств . ------------------- "Беспилотные авиационные системы. Часть 5. Дистанционно управляемые авиационные системы - закономерность развития пилотируемой авиации" авторы: В.В.Ростопчин, С.С.Румянцев, издательство ООО "Техкомтех", 21 декабря 2002 года : "...Если посмотреть на соотношение стоимостей фронтового самолета и танка, то можно увидеть, что до середины 50-х годов ХХ века стоимость танка превышала стоимость самолета (речь идет о фронтовом самолете типа истребитель, штурмовик). В начале века это соотношение было 0,25...0,35. В середине 50-х годов стоимости были примерно равными, а после 50-х годов стоимость самолета начала расти более интенсивно. В результате цены многоцелевого фронтового самолета типа Су-34 и танка типа Т-80 имеют соотношение 10...12 к 1, т.е. самолет оказался на порядок дороже одной из целей по которой он будет работать. Поистине льем золотые пули для стрельбы по бутылкам..." Для справки. Современные пилотируемые военные и гражданские самолёты, вертолёты, и др. аэромеханические транспортные машины, оснащаются очень сложным и надежным ПНК и другой бортовой аппаратурой (сервоприводы,радиостанции и т.д.), поэтому могут выполнять большинство функций в полностью автоматическом режиме, и к тому же все это многократно резервируется, поэтому, даже внутризаводская себестоимость получается такой высокой. Основные функции военной авиации тактического класса : 1) уничтожении живой силы, техники, инфраструктуры; 2) получение разведывательной информации; 3) доставка различных грузов и объектов. Соответственно существуют боевые, разведывательные и транспортные задачи. Современные военные дроны, тактического класса, в основном, выполняют уже все три задачи. Примерная цена многоцелевого истребителя("Хорнет") - 30...50 млн.долл. , а примерная цена многоцелевого дрона("Хищник","Жнец") - 3...5 млн.долл. "Хищник" и "Жнец" имеют схожие планеры, но разные моторы. "Хищник" и "Жнец" такие дешевые по следующим причинам: 1. "Хищник" и "Жнец" выполнены с использованием узлов и агрегатов, которые в основном позаимствованы с гражданских изделий(самолетов,автомашин,катеров), и эти узлы и агрегаты существенно ниже по себестоимости, чем узлы и агрегаты создаваемые для эксклюзивно военного применения, поскольку гражданские комплектующие производятся крупносерийно или даже массово с использованием специализированных инструментов, оснастки, приспособлений, контрольного оборудования, стендового оборудования, диагностического оборудования и др. То есть, говоря языком заводского технолога, "Хищник" и "Жнец" существенно технологичнее в массовом производстве и эксплотации, в них очень высокий коэффициент отраслевой и межотраслевой унификации. 2. "Хищник" и "Жнец" спроектированы под существенно меньшие усилия, воздействия, нагрузки и соответственно имеют сравнительно низкие ЛТХ и ТТХ (как автономные изделия, но системы на их основе намного эффективнее, по критерию "стоимость/результативность", чем системы из пилотируемых военных ЛА). 3. "Хищник" и "Жнец" имеют меньшие коэффициенты запаса по перегрузке, перегреву, эксплуатац. ресурсу и т.д. , поскольку степень неопределенности параметров внешних воздействий и ответных внутренних реакций для дронов много меньше, чем для пилотируемых летательных аппаратов. Главная цель замены военных пилотируемых летательных аппаратов(ЛА) на дроны - это снижение общих расходов на военную авиацию. Далее. Ракеты класса "воздух-воздух", "земля-воздух" могут перемещаться с тангенциальными и нормальными ускорениями, обеспечивающими перегрузку до ста и более, при этом их уже давно оснащают железом, датчиками и софтом для обеспечения функций искусственного интеллекта (распознавание_образов,экспертные_системы) и коммуникации с другими объектами (истребителями, разведчиками,другими_ракетами,БПЛА,спутниками и т.д.), что позволяет реализовать удалённые вычисления(как сейчас их стало модно называть облачными вычислениями) так что уязвимость самолетов все больше, несмотря на применение зачастую недешёвых средств активной и пассивной защиты (ИК ложные цели, ИК направленные излучатели-подавители, лазерные излучатели-подавители, контейнеры с аппаратурой для радиоэлектронной борьбы, многофункциональные автономные аэродинамические ложные цели типа "Куэйл","MALD"). Нынешняя тенденция - беспилотные штурмовики(Х-47, "Авенджер"). Завтрашняя тенденция - беспилотная почти вся военная авиация. в начало раздела -------------------- Истребитель F-22 "Раптор" получит новые "мозги" : "Бортовое радиоэлектронное оборудование (БРЭО) истребителя F-22 "Раптор" оказалось настолько сложным и дорогостоящим, что ВВС США планируют пойти на беспрецедентный шаг и оснастить истребитель дополнительным параллельным комплектом БРЭО. ... ... В 2014 году планируется обновить программное обеспечение (Increment 3.2A), что усилит электронную защиту от помех и расширит возможности системы обмена данными Link 16. В 2017 году пакет модернизации Increment 3.2B добавит поддержку ракет AIM-9X и AIM-120D. На все это планируется потратить 8 млрд долл. и не исключено, что стоимость возрастет в связи с увеличением количества модернизируемых самолетов ..." Существенная доля в себестоимости самых современных многоцелевых боевых самолетов (типа многоцелевой тактический истребитель) - это стоимость авионики и вообще всего бортового радиоэлектронного оборудования(БРЭО). При серийном производстве, которое занимает в пределах десяти-двадцати лет (далее производится только модернизация), себестоимость аппаратного обеспечения БРЭО быстро снижается, ведь себестоимость микроэлектронных компонент всегда очень быстро уменьшается, зачастую перегоняя в скорости падения прирост тактовых частот(степени интеграции, объемов памяти и т.д.) СБИС. А вот себестоимость программного обеспечения(софта) снижается очень даже потихоньку(системный софт в принципе не очень дорогой, а вот прикладной - тот получается всегда дорогим и эксклюзивным, а как правило прикладного софта получается в несколько раз больше, чем системного). Через 5...10 лет серийного производства БРЭО, его единственно реально ценная составляющая - это софт. Все остальное БРЭО морально старше начинки среднего сотового радиотелефона и ретранслятора сотовой радиосети. Кстати, по этой причине, очень прост и дешев апгрейд железа БРЭО, а вот апгрейд штатного софта БРЭО - это кошмар для начальника СКБ и министерства финансов. --------------------- Статья под названием : "Террористы осваивают беспилотные летательные аппараты" и статья под названием : "Угроза терроризма с использованием беспилотных летательных аппаратов" Мои комментарии. Производство(тем более проектирование), продажа дронов не запрещена ни УК Кыргызстана, ни какими-то другими законами. Террористы все равно купят дроны у тех же русских генералов, самый типичный пример - тупой и наглый гэбнюк по фамилии Бут, который по жизни был военным переводчиком и просто по дешевке скупал на складах оружие и боеприпасы, а затем распихивал по всему миру. Шамиль Басаев, в сравнении с полурусской скотиной Бутом, является образцом порядочности и трудоюбия. Внедрение БПЛА в гражданские и военные секторы тормозится опасениями спецслужб. Одно дело, когда применением БПЛА занимаются штатные сотрудники госбезопасности и прочих силовых ведомств, которых можно более-менее контролировать, и к тому же количество БПЛА там сравнительно небольшое. Но совсем другая картина в Вооруженных Силах, особенно Сухопутных. Там надо применять очень много дронов, иначе не будет результата (классический пример - массовый,дешевый,технологичный для поточного производства и технологичный для массового применения самолет-снаряд "V-1", массовое применение которого серъезно воздействовало на морально-психологическую атмосферу населения Лондона, вселяя панику в настроение британской элиты, рабочих военной промышленности, и это при том, что Гитлер не стал применять боевые отравляющие вещества и бактериологическое оружие, если бы Гитлер смог начать массово применять "Фау-1" ("V-1") в 1940 году, то почти наверняка он смог бы заставить Великобританию заключить перемирие на выгодных для Рейха условиях, и тем самым, потом, без проблем разобраться с русскими на востоке, чечены могут таким же образом хуярить русаков, особенно москвичей, и тут придет пиздец тэррыторыальной целкостности Русни, и русня сама подвесит Путина за яйца :) ). Половина военнослужащих Сухопутных Войск - рядовые и сержанты срочного призыва, из них много алкоголиков, наркоманов, судимых и вообще придурков, которыми почти невозможно контролировать. Поэтому вероятность хищений и продажи даже БПЛА большой дальности и грузоподъемности там очень высока. На Военно-морском флоте, контролировать проще, там все локально - на море или на локальных базах (применение,ремонт,сервис). В гражданском секторе, спецслужбы практически не в состоянии помешать производству и применению БПЛА средней и даже большой дальности и грузоподъемности. Ведь не поставишь же надзирателя к каждому бездельнику(с навыками радиолюбителя и знаниями ассемблера) и фермеру. Так что у маленьких артелей и кооперативов появляется уникальная возможность конкурировать на нешутейном рынке(средних БПЛА, возможно больших БПЛА) даже с гигантами авиастроительной индустрии!. Гэбня сможет отслеживать и мешать применению БПЛА лишь только у сравнительно крупных потребителей. Кстати. Это приводит ко все большему сползанию высокоразвитых стран к тоталитаризму. В самом деле, ведь у спецслужб всегда стоит задача предотвращения бунтов и покушений на жизни правителей и их семей (ведь многие простые люди хотят убивать правителей и их родственников, как говорится, делая большие дела наступаешь на мозоли всякой мелюзги, мелюзга - это простой люд, который зачастую готов разорвать на части очередного "всенародно_избранного"). Для этого спецслужбам надо пытаться упреждать действия бунтовщиков,заговорщиков и тайных обществ, а для этого им надо пытаться заполучить информацию об состоянии дел у них и об их замыслах. Но развитие техники обработки и передачи информации делает подслущку,прослушку,подглядывание очень трудной задачей(зачастую невыполнимой). Поэтому единственно реальные методы борьбы с бунтовщиками и заговорщиками - это доносы от соседей,сослуживцев и знакомых, обработкой которых занимается тайная полиция(охранное отделение,органы борьбы с внутренними противниками власти, политическая полиция и т.д.) , а также внедрение агентов-провокаторов. Со временем, численность тайной полиции с неизбежностью увеличивается, а ее бюджет растет еще быстрее. Но. Каждое обвинение ведь надо доказать в суде, а донос не является прямой уликой, а значит любой мало-мальски известный адвокат сможет отмазать любого заговорщика, если заговорщик предусмотрительно выполнил элементарные действия по девальвации обвинения. Например, еврей убивший сибирской язвой нескольких человек(включая сенатора), смог элементарно водить за нос ФБР, то есть еврей очень просто смог даже не подпустить целый ФБР до суда. В конце-концов, властям не останется ничего иного, как отменить основные принципы правового государства(стандарты следствия и судебных технологий) : 1. Бремя доказательства лежит на обвинении. 2. Презумпция невиновности. 3. Запрет безсудной казни. 4. Всякое сомнение толкуется в пользу обвиняемого. 5. Состязательности сторон судебного процесса. 6. Запрет заочных судов. и т.д. В результате. Русские головорезы поубивали : Дудаева,Масхадова,Яндарбиева, и сотни тысяч чеченов без всякого суда и следствия, и продолжают убивать чеченских партизан без всяких судебных приговоров(чечены как могут мстят - в 2012 перерезали глотку какой-то русской свинье - летчику штурмовика в Нальчике). Хотя русские - это полудикая империя, и они - нетипичный пример. А вот Соединенные Штаты Америки, являясь, пока, одной из наиболее цивилизованных стран с наибольшим приближением к идеальному правовому государству, с неизбежностью погружаются в болото тотальной полицейской слежки. Еще один интересный социально-политический аспект в сфере применения Шахидов - это все большая поляризация из-за положительной обратной связи в глобальном мире и большущий разрыв между уровнем развития мышления убийцы и техническим уровнем вооружений. Русские намертво вцепились в чеченов (типа "единая и неделимая Урусия", хотя другие русские, но белые - украинцы,беларусы спокойно живут в своих царствах-государствах и посылают Москву подальше, когда им это удобно) , в результате русские оккупанты убили достойнешего Человека - Джохара Дудаева, кстати, сделав вдовой его русскую супругу Аллу. Затем, с неизбежностью, русские усадили на трон пахана-вертухая, академика-тракториста с физиономией садиста и знанием Корана - Кадырова. В результате, русские жили и живут в ментальности 19 века, чечены живут в ментальности 17 века, и они друг-друга ублажают(как говорится "с кем поведешься от того и наберешься"(c) ). Итальянцы решили навести порядок в своей бывшей колонии - Ливии. В результате, они убили диктатора Каддафи. Какой интерес фабрикантам,сервисмэнам и реселлерам Шахидов со всего вышеуказанного ? А вот какой - многие дикие народы придерживаются принципа кровной мести, поскольку их индивиды, ментально, слабо отделяют себя от своего рода, а племя живет очень длинным временем - отсюда долгая память и стремление убивать потомков убийц, например этого принципа придерживаются те же вайнахи,туареги,берберы,бедуины,пущтуны и т.д. Интересно, что массовые убийства(геноцид) подпадают под действия международных трибуналов и не имеют срока давности, чем схожи с обычаем кровной мести(а вообще говоря, цивилизация оставила месть, переименовав ее на возмездие). Таким образом, налицо типичная положительная обратная связь между уровнем развития народов (господина и раба) и методами поиска справедливости(истины), но при этом убивать уже можно намного эффективнее, чем зарезать кинжалом или пристрелить карабином. Многие чечены поклялись отомстить Ельцину,Путину и их отродью и вообще русским скотам(тот летчик в Нальчике с перерезанной глоткой, до него Буданов и др.), Каддафи поклялся отомстить Берлускони, иракский араб мусульманин-суннит бросил ботинок в Бушонка и т.д. - все это типичные явление, которые показывают закономерность порождающую спрос на средства для терростических операций, особенно для покушений на жизнь больших начальников,правителей и их родственников. К коим весьма подходящ дешевый,простой,автоматический Шахид-1. Ведь джигитам некогда и трудно читать мудрёные инструкции и учиться вертеть ручками джойстиков. Составим обобщённую схему террористического акта, которая соответствует наибольшему числу реальных. Мы увидим, что есть три основных компоненты: 1) исполнитель(шахид - например шофёр легкового автомобиля); 2) транcпортное_средство(например легковой автомобиль); 3) взрывчатка с детонатором. В этом перечне, наиболее ненадёжный и капризный компонент - шахид(человек), это очевидно. Поэтому во многих странах мира постепенно вводится система тотального контроля транспорта и на транспорте. Интересно, наступит ли антиутопия, при которой будут сажать в тюрьму за любительское конструирование транспортных роботов ? :) :) :) :) Это будет сродни средневековью... кощуники,кощуницы,чернокнижники,еретики... :) :) :) :) мне это что-то напоминает... Интересный довод в пользу применения террористами, именно БПЛА, можно вывести на основании практики(глобальной стратегии) антипартизанских операций и некоторых исторических аналогий. Генерал Гудериан, составил список наиболее опасных видов вооружений абстрактного противника для абстрактных танков. Самым опасным для танка оказался вражеский танк. Если посмотреть историю вооружений, то, как правило, наиболее эффективным для уничтожения вооружения является его тождество в руках врага. Как говорится, самая жесткая конкуренция - внутривидовая, самая лучшая оборона - это нападение, и вообще, клин вышибается клином. С другой стороны, самым эффективным видом вооружений против партизан является именно авиация. Малоразвитые и не очень продвинутые страны используют армейские штурмовики(Колумбия,Узбекистан, Россия,Турция,Пакистан и т.д.). Но армейские штурмовики не предназначены для антипартизанских операций. Поэтому стратегия таких операций(с применением армейских штурмовиков) получается очень дорогой и скандальной(стрельба из пушки по воробьям). Передовые в техническом развитии страны(США,Франция,Израиль и т.д.) все больше используют БПЛА для отхуяривания всяких террористов(партизан,талыпов,инсургентов,нукеров) : "Стратегия развития армии США: ставка на беспилотник [cnews.ru] от 12.11.12 Итоги президентских выборов в США серьезно повлияют на технологические аспекты развития армии США. Несостоявшийся президент Митт Ромни и переизбранный Барак Обама имеют разные взгляды на перспективу развития армии США. Так, Ромни заявлял о необходимости дальнейшего производства истребителей 5-го поколения F-22, постройки новых кораблей и увеличения численности личного состава на 100 тыс. То есть республиканский кандидат планировал совершенствовать "классическую" военную структуру и делал ставку на традиционные средства ведения войны, хоть и созданные на основе высоких технологий. В свою очередь, Обама делает ставку на расширение военных операций с применением беспилотных систем. Когда он пришел к власти, удары с беспилотников были эпизодическими – раз в одну-две недели. Теперь беспилотные системы стали стержнем глобальной антитеррористической кампании США. Именно с подачи Обамы дистанционная доставка смерти стала рутинным делом и получит еще большее распространение. В начале первого срока Обамы, бывший в то время директором ЦРУ Леон Панетта отметил, что беспилотные летательные аппараты были "единственной возможностью" для борьбы с террористами в Пакистане. Он имел в виду не очень удачный опыт вторжения в Ирак и Афганистан, который никто не хотел повторять, а людей-разведчиков, проводящих традиционные операции, в Пакистане не хватало. Таким образом администрация Обамы создала совершенно новую стратегию борьбы с терроризмом, а проще говоря войны с помощью беспилотных летательных аппаратов. Лишенные каких-либо бюрократических и социальных (для США) проблем, беспилотные войны с минимальными затратами смогли нанести большой ущерб противнику. Теперь дистанционные удары с помощью БПЛА и рейды спецназа становятся основным инструментом США для воздействия на врага, с которым нельзя "разобраться" оккупацией. Беспилотные "представители интересов США" из Ирака, Афганистана и Пакистана уже прилетели в Йемен в Сомали. И теперь, когда Обама снова избран президентом, ударные беспилотники в скором времени должны прибыть и в страны Африки. В частности назначение бывшего командующего операцией в Афганистане генерала Дэвида Родригеса на пост командующего американскими силами в Африке, возможно, указывает на то, что Обама намерен разрешить африканский кризис, например, в Мали, с помощью доказавшего свою эффективного средства – ударных БПЛА. Беспилотники будут отслеживать и мешать распространению Аль-Каиды в Северной и Восточной Африке, а также уничтожать базы террористов в таких местах, как Джибути. Хуже всего, что беспилотная война становится рутиной, и живущие под мирным небом, забывают, что где-то на другой стороны планеты круглосуточная угроза БПЛА сводит с ума ни в чем не повинных людей, которым не повезло жить рядом с врагами США. Даже когда войска уходят, как планируется в Афганистане, беспилотники остаются "висеть" в небе и регулярно напоминают о себе ракетами и бомбами. В том же Пакистане, во многих регионах люди буквально сходят с ума от постоянного гула двигателей БПЛА, не общаются друг с другом, не собираются большими компаниями и т.д. В общем живут хуже, чем при оккупации и каждую минуту ждут смерти с неба. Кроме дистанционной войны с помощью беспилотных систем, Пентагон собирается использовать и новый военный инструмент. В частности, оборонное научное агентство DARPA запустило проект под названием Plan X, в рамках которого кибероперации с разрушением информационных сетей, похищением данных и применением вирусов вроде Stuxnet должны стать обыденным делом при проведении военных операций." Таким образом, логически связав список Гудериана с афганской(северо-кавказской) повседневностью, приходим к выводу - чечены наиболее эффективно могут хуярить русских колонизаторов,оккупантов и местных марионеток именно при помощи БПЛА. И нам буде заказы... в начало раздела ----------- 25.05.2012 [lenta.ru] "Министерство обороны Египта приобрело у Китая лицензию на производство 12 беспилотных летательных аппаратов ASN-209, сообщает Strategy Page. Сумма сделки не уточняется. Производством таких аппаратов в Китае занимается предприятие ASN Technology. Египет намерен использовать китайское оборудование для разведки и наблюдения. Беспилотники ASN-209 массой 320 килограммов способны нести полезную нагрузку массой до 50 килограммов. Аппарат способен развивать скорость до 140 километров в час, а дальность его действия составляет 200 километров. ASN-209 может находиться в воздухе до десяти часов. ..." Предположим, что у дрона ASN-209 крейсерская скорость равна 100 км/час , тогда его максималь- ная дальность полета (перегоночная дальность) будет 800...1000 км . Заметили нестыковку ? Чем она обусловлена ? Теми самыми международными договорами - РКРТ и Вассенаарские соглашения. Подавляющее большинство производителей и продавцов дронов придерживается этих договоров. Если посмотреть на ЛТХ большинства средних дронов, то там указана именно лимитная дальность в 200 км, хотя понятно, что реальная дальность больше в 5...10 раз ! Возникает вопрос - каким образом производитель контролирует заявленную в ЛТХ дальность полёта ? Ответ очевиден - производитель закладывает в штатном софте контроль программной траектории(или полетного задания) по этому параметру. Удивительно, что египетские чучмеки(менты,гэбнюки,вояки) не могут организовать проектирование дронов ??? Хотя, если вспомнить, что этих арабов лупили карликовые евреи(Израиль по населению и территории меньше раз в двадцать, чем арабы) становится понятно, что арабские чучмеки занимались и занимаются своим любимым делом - ебут друг друга в жопу, своей многовековой коррупцией. Здешние чучмеки занимаются примерно тем же. Кстати, закупка китайских дронов египетской башкармой была не от хорошей жизни, т.к. египетские анархисты, при поддержке палестинских партизан, перед тем взорвали экспортный газопровод по которому природный газ поступал в Израиль. ----------- Статья от 25.08.2005 под названием : "Таджикские пограничники сбили парашютиста с 18 кг героина." : "...Таджикские пограничники сбили в районе границы с Афганистаном самодельный летательный аппарат с крупной партией героина. Как сообщает Газета.ру, сейчас на одном из участков Шуроабадского погранотряда, где произошел инцидент, ведется поиск пилота, которому, несмотря на ранение, удалось уйти от преследования. С помощью летательного аппарата, который представлял собой обыкновенный парашют с моторчиком, перевозилось свыше 18 кг героина. ..." В этой статье, вероятно, немного неточно. Скорее всего, пилот-наркоперевозчик летел при помощи параглайдера с ранцевым моторчиком. Далее. Такие параглайдеры "а ля Карлсон", продаются в рознице. И кстати, цена у них весьма нехилая, не меньше полторы штуки баксов. Ранцевый моторчик с пропеллером весит примерно 25 килограммов, так что пилоту пришлось с месяц покачаться на тренажерах. Общий вес на нем был почти в полцентнера [ 25+18 = 43 ] . Пилот был если и не лилипутом, то уж и не мастодонтом. Подъемная сила, развиваемая параглайдером с ранцевым моторчиком, позволяет летать одному человеку средней комплекции. Если бы пилот летел ночью, то шансов быть сбитым было бы много меньше(Руст смог ночью перемахнуть через бугор совка, а ведь ераплан и побольше, и тарахтит громче, и пограничники по настоящему пятнисто-мордастые с радарами, значками ГТО и билетами членов ВЛКСМ) , но, ориентироваться по GPS-навигатору очень непросто, когда на тебе висит полцентнера и еще тебе надо следить за высотой(иначе впечатаешься в какую-нибудь скалу), и подергивать клеванты(стропы)... Если бы параглайдером управляла автоматика, то есть вместо пилота-задницы была электроника, то эффективность операции, с позиции боссов мафии, была бы в двое выше(как минимум). Так как: 1. Если вместо пилота летит аппаратура массой килограммов двадцать, то можно добавить героину килограммов тридцать, поскольку пилот весит килограммов уж никак не меньше пятидесяти (даже если хорошенько посрет и поссыт. 2. У пилота язык, а это всегда опасно. Как сказано в заметке, пилота подстрелили, но не насмерть. Если бы его поймали, то могли бы взять за жопу кого покруче. Кстати, очень может быть, что пилот откупился от пограничников(группы захвата, которая побежала его ловить), так что боссу приходится рисковать дополнительными баксами. Для Уголовного Кодекса, параглайдер - транспортное средство, которое злоумышленник использовал при совершении своего деяния. Этот параглайдер, пилот купил в магазине или на базаре, даже продавец не несет никакой ответственности. Иначе надо брать за жопу любого продавца ишаков,велосипедов,грузовиков,... Кстати. Коалиционные силы собирают шмотки и свалят с Афгании к 2014. Реселлеры Шахидов будут приходить в мою контору, - сэкономлю на дистрибьюции и логистике. Со временем, надеемся обслуживать джигитов с отрогов Кавказского хребта. Аккурат к Сочи-2014 и для нефтегазовых объектов Русни. ------------ 06.07.2011 [lenta.ru] "ВМС США испытали программное обеспечение палубного беспилотника" : "ВМС провели испытания программного обеспечения, которое будет использоваться для управления и автоматической посадки на палубу авианосца перспективного беспилотного летательного аппарата X-47B UCAS-D... ...В ходе проведенных испытаний, программное обеспечение и дополнительное оборудование были установлены на истребитель F/A-18D Hornet, который должен был имитировать X-47B... ...Ранее аналогичные проверки были выполнены при помощи более медленного самолета Hawker Beechcraft King Air..." Интересная заметка. Вероятно, автоматическая посадка на палубу производится вычислительными системами из класса систем с нечеткой логикой или при помощи нейрокомпьютинга(эмуляция нейросетевых контроллеров). При автоматической посадке на палубу, которая может покачиваться, возможны внезапные порывы ветра (хотя для палубных F/A-18 есть максимально допустимая величина балльности ветров, все равно, самолет должен иметь какой-то коэффициент запаса по допустимой силе ветра, чтобы гарантированно зацепить своим гаком трос аэрофинишера) и возможны разнообразные люфты и гистерезисы в бортовых сервах, которые надо успевать измерять и затем учитывать. САУ даже устойчивого самолета с хорошей управляемостью должна использовать довольно сложные алгоритмы, которые должны прокручиваться с большой скоростью. Такие алгоритмы, вероятно, трудоёмки в разработке и особенно в тестировании (а в целом, эти дела составляют целую канительную цепочку: постановка_задачи,моделирование,составление_алгоритма,кодирование,отладка). Экономически, намного эффективнее применять недетерминированные системы, чем традиционные системы типа дискретных вычислительных машин(они детерминированы и являются машинами Тьюринга). Самое забавное, это то, что даже очень богатые и могущественные корпорации не могут обеспечить надежное моделирование разработанных систем. Казалось бы, дешевле разработать достаточно адекватную модель (как правило программно-аппаратную) в виде приличного стенда, и на этой модели хорошенько погонять виртуальный самолет. Но нет, супер корпорации предпочитают лажаться, как какие-нибудь тупые генералы-медные_лбы, и дрочить по-сути макетный образец своего штатного софта на нескольких натурных образцах, типа реинкарнации суки в космическом корабле "Восток". Мой вывод с этой заметки. Проектирование и изготовление приличных дронов вполне доступно для кустарей-одиночек и мелких фирмёшек. Для проектирования и мелкосерийного производства дронов не нужны большие основные фонды (здания, станки, инженерные сети, стенды, полигоны и прочее) , но потребны относительно высокие временные затраты на программно-технические работы и требуются сравнительно квалифицированные программисты-прикладники. в начало раздела ---------------- 30.11.2011 [cnews.ru] "Американцы заставляют армию "поумнеть" : "18 ноября 2011 года на полигоне White Sands Missile Range начались учения армии США, которые оценивают совершенно новый подход к построению высокотехнологичной армии и ее модернизации. В течение трех недель Пентагон проверит совершенно новую концепцию сетевой интеграции подразделений - программу NIE. NIE – это очень смелый инновационный шаг, на который пока не решилась ни одна армия мира. Программа NIE подразумевает расширение возможностей армии за счет внедрения коммерческих сетевых технологий в систему боевого управления. Это позволит быстро и относительно дешево создавать военные сети и постоянно держать армию на переднем крае науки и техники. Таким образом Пентагон планирует решить проблему современных методов модернизации армии. Дело в том, что сегодня проектирование, постройка и тестирование сетецентрических военных технологий занимает очень много времени и требует гигантских вложений денег и человеческого труда. При этом в финале зачастую получается испытанная за десятилетия разработки дорогая и надежная, но уже совершенно ненужная и устаревшая система, которая не соответствует современным реалиям боя, но поступающая в войска десятками тысяч единиц. Это, например, происходит с перспективной системой радиосвязи Joint Tactical Radio System (JTRS). Ее разрабатывают уже более 15 лет и постоянные корректировки требований под текущие и перспективные потребности армии грозят превратить JTRS в вечный «долгострой». Программа NIE подразумевает совершенно иной подход: в будущем армия будет закупать только небольшие «апгрейды», комплекты модернизации, быстро встраивая новые технологии в базовую платформу или архитектуру. Таким образом новинки вроде сетевых протоколов, интерфейсов, систем безопасности или терминалов будут легко встраиваться в существующую систему и не столкнутся с проблемой несовместимости с устаревшим военным оборудованием. ..." Эта статья подитоживает очевидную универсальную тенденцию : побеждают не те стандарты, которые приемлемей для данной узкой области, а те, которые универсальней. В военной области побеждают протоколы и стэки протоколов "обычного" Интернета - TCP/IP, FTP, HTTP, PPTP, HTML, SSL, Ethernet и прочие (см. модель OSI и стандарты Интернета) . До этого, в области военных разработок "прижился" язык "Си", а затем и "Ява", хотя упорно внедряли язык "Ада"(до нее был ископаемый "Кобол") . Военные многих стран вынуждены "терпеть" операционную систему "Windows", хотя ее исходники доступны только Пентагону. А все потому, что любому "компьютерщику" известно, что периферийная плата или какой другой дэвайс продается в комплекте с драйвером под Виндоус, если захочешь заставить этот дэвайс работать под Юникс Фри Би-эс-ди, то затратишь уйму времени и нервов. Поэтому, в наших Шахидах рационально не ориентироваться на специализированные промышленные контроллеры (PLC), которые безусловно хороши, но дороги, и самое главное имеют только специализированные графические среды разработки (типа схем релейно-функциональной автоматики) и архаичные(аналоговой эпохи) проблемноориентированные языки. То, что по-сути, офисная техника "нокаутировала" промышленную и военную технику иллюстрирует процесс движения по пути постиндустриальной эпохи. ----------------- Здесь будет немного воды. Системы глобальной орбитальной радионавигации начали создаваться в 60-е годы. Одной из первых была американская военная радионавигационная система на базе орбитальных радиомаяков - система "Транзит". Существуют системы дальней(стратегической) радионавигации с использованием наземных радиомаяков LORAN-C, ТРОПИК-С , также системы ближней(тактической) радионавигации TAСAN, и др. , которые используются военными и гражданскими потребителями. Американцы создали нынешнюю GPS еще в 80-е годы, но давали высокую точность только для военных потребителей, сигнал диапазона (L2). Гражданским потребителям(вне США) они предоставляли искусственно заниженную точность введением искусственных шумовых помех в сигнал гражданского диапазона (L1). Американцы боялись, что террористы будут конструировать и изготавливать высокоточные, дешевые ударные дроны. Ведь аппаратура дальней высокоточной навигации обычно стоит очень дорого. Мне нигде не попадались в продаже ни лазерные, ни волоконно-оптические гироскопы, значит такие приборы стоят очень дорого, а без них почти невозможно изготовить высокоточную,компактную, надежную ИНС. GPS - это единственная навигационная система, которая предоставляет: дешевую, высокоточную, компактную, анонимную, общедоступную, малопотребляющую(мощности), стойкую ко многим воздействиям навигационную приемную аппаратуру с открытым протоколом доступа на программном потребительском уровне(NMEA), не требующей от потребителя какого-либо взаимодействия с радиомаячной(радиопередающей) частью системы. Американские гражданские потребители, они же налогоплательщики, заставили свои власти сделать гражданский GPS таким высокоточным, каким он теперь является(убрали искусственную шумовую помеху). Было это сделано в 2000 году (хотя, возможно, что перед этим, кто-то стал периодически продавать прошивку для чипов памяти GPS-модулей(L2), и на базарах стали продаваться радиолюбительские наборы для монтажа приемников для L2 :) , а вояки замучились менять прошивку кодеков на спутниках :) ). Сразу по всему миру возникла куча бизнесов, которая стала кормиться с такой халявной услуги, которую фактически оплачивали американские налогоплательщики. Далее. Во многих странах, дроностроителям сильно мешает гэбня. Вот например что указано на вэб-странице с информацией для потенциальных клиентов московской фирмы "ЗАО "НТЦ Рисса" [ruav.ru]. Эта фирма делает и продает, среди прочего, дроны-самолеты у которых грузоподъемность и дальность полета хорошо подходят для террористических операций или для операций по перевозке, например, наркотиков : "...Я послал вам электронное письмо, но ответа не получил. Почему ? Если Вы не получаете ответа на ваши письма, то это может быть по двум причинам: ... 2. Вы не указали своего имени / компании. Пожалуйста, обратите внимание на то, что мы не отвечаем на анонимные письма. Убедительная просьба - указывайте в теле письма Ваши ФИО и компанию, которую Вы представляете. ..." Понятно, что эту фирму пасет гэбня. Поэтому руководство фирмы вынуждено это делать (но скорее всего, начальники в этой фирме - действующие и отставные гэбнюки, в пользу этой гипотезы тот факт, что эта фирма проектирует и изготавливает много дронов для гэбни,ментов и прочих звездастых невоенных кэнсъюмеров). В результате, многие бизнесмэны не смогут стать дистрибъюторами продукции этой фирмы, и значит продажи неплохих дронов этой фирмы будут маленькими. Покупателями смогут стать только средние и большие фирмы, в менеджменте которых сидят гэбнюки и стукачи, особенно в полутоталитарных и авторитарных странах. Вот сообщение из той же оперы : "[cnews.ru] от 12.02.07 Япония: продажа БПЛА в Китай обернулась неприятностями Сотрудникам компании Yamaha Motors грозят серьезные неприятности за попытку продажи в Китай обычных беспилотных вертолетов, широко использующихся в сельском хозяйстве. ... " Неформалы из "Аун Синрике" рассматривали вариант средства доставки боевых отравляющих веществ в виде дрона-вертолета, и даже проводили натурные испытания, но, не имея сноровки, вероятно, замучились ремонтировать поломки носителя. Кстати, это дополнительный довод в пользу простых в эксплуатации дронов и при этом роботов, а не капризных и при том манипуляторов. Не каждый потребитель имеет навыки опытного авиамоделиста. После этого, видимо, гэбня решила запретить вообще продажу дронов-вертолетов и особенно оборудованных целевыми сервоустройствами для распыления химикатов. Опять получаем те же результаты : 1. РЫНОК ДРОНОВ C ГРУЗОПОДЪЕМНОСТЬЮ 100...150 кг И ДАЛЬНОСТЬЮ ПОЛЕТА >200 км ИСКУССТВЕННО ОГРАНИЧЕН !!! 2. НА РЫНКЕ ДЕШЕВЫХ ДРОНОВ C ГРУЗОПОДЪЕМНОСТЬЮ 100...150 кг И ДАЛЬНОСТЬЮ ПОЛЕТА >200 км СУЩЕСТВУЕТ ГИГАНТСКИЙ НЕУТОЛЕННЫЙ СПРОС СО СТОРОНЫ МЕЛКИХ БИЗНЕСОВ И ЧАСТНИКОВ !!! в начало раздела ---------- Из статьи "Мифы беспилотной авиации" [dpla.ru] авторы Э.П.Лукашева, Н.В.Чистяков : "...8. Краткий итог развенчания мифов. Подводя итог, можно кратко сформулировать, что беспилотные летательные аппараты и беспилотные авиационные комплексы на их основе неудобны и непомерно дороги для гражданской службы, а области их применения сводятся к тем или иным разновидностям воздушной разведки или приёма и передачи радиосигналов в качестве, например, ретранслятора. Так ли всё печально для БПЛА и ДПЛА? Видимо нет. Отмеченные укрупнённые области их применения достаточно важны для практики, в том числе и гражданской. Дороговизна же и неудобство гражданской эксплуатации обусловлены тем, что рассмотренные в статье беспилотные авиационные комплексы были изначально задуманы и созданы как военные. Экономический, точнее денежный, фактор при их создании не играл большой роли, а в условиях советской оборонной промышленности и плановой экономики, строго говоря, вообще не играл никакой роли. В условиях новой реальности необходимы новые комплексы БПЛА, специально ориентированные на гражданскую эксплуатацию, создаваемые с самого начала в качестве конкурентов пилотируемым гражданским самолётам, применяемым для аналогичных целей. Это очень непростая задача. Это вызов сегодняшним Главным конструкторам комплексов отечественных БПЛА и ДПЛА. ..." Чистяков - авторитетнейший специалист в дроностроении, обладающий энциклопедическими знаниями и немалым опытом в этой области. Любому любителю-дроноклепальщику известна эта фамилия - мэтра и энтузиаста. Концепция нашего БПЛА Шахид-1, полностью укладывается в парадигму господина Чистякова. Еще замечу, что многие : дэхкане, нукеры, кабальеросы, мучачосы, феллахи, пацаны, ваххабыты, суфии, анархисты, токфэрыты, салофыты, чуваки, неформалы, карбонарии, комбатанты, инсургенты, партизаны, масоны, подпольщики, джигиты, талыпы, мюриды, моджахэддины, шейхи, асасины, челкашы, дэрвыши и народные мстители крайне нуждаются в поистине народном дроне-самопале ! Далее, такие резоны. Во времена оные, компьютер IBM PC AT-286 стоил столько же, сколько новенький автомобиль. А пионэры и школьники, клепали в сараях дельтапланы из подручных материалов и потом летали на них до посинения. Кто понастырнее из них, тот ставил на свой дельтаплан лодочный мотор и летал над полями. Теперь, ноутбуки и лэптопы стоят, как плохонький мопедик, и нужно быть ну очень ленивым инженером, чтобы не сделать БПЛА из мотодельтаплана. ---------------- Вот сообщение под заголовком сельскохозяйственный БПЛА : "Тенденция уменьшения норм внесения химпрепаратов (высокая эффективность при малых количествах, отпадает необходимость эксплуатировать и содержать специализированную сезонную многотоннажную технику) и ужесточение требований к экологической чистоте продукции и охране окружающей среды заставит усовершенствовать методику и оптимизировать технические средства внесения био-химпрепаратов, перейти к прогрессивным прецизионным, соответствующим международным. Идет постоянный конструкторский поиск специализированного сельхозсамолета. Тому подтверждение – демонстрация на каждой авиавыставке «нового» сельхозсамолета. Но даже самому совершенному самолету (а значит не самому дешевому) нужен ювелир-пилот в силу сложности пилотирования на сверхнизкой высоте с большим количеством разворотов. При полете в автоматическом режиме с однообразной утомительной работой лучше должна справиться автоматика, особенно над полями небольших размеров и сложной конфигурации. При полетах на малых высотах, необходим блок "Компьютерное зрение". Для решения задач различного назначения (в том числе и прецизионного внесения химпрепаратов) построен летательный аппарат со следующими характеристиками: •размах крыльев, м – 4; •вес полезной нагрузки, кг – 100; •максимальная скорость полета, км/час – 150; •минимальная скорость полета, км/час – 60; •средняя продолжительность полета, ч – 2; •силовая установка – два двигателя по 15 л.с.; •вес самого носителя, кг – 80; •время на подготовку к полету, мин – 30; •полет при опылении возможен с использованием параплана. Харьков, НТК "Эксперт", 21.02.2005 г. " Неплохой самолетик смастерили харьковчане. Таким удобно возить героин или распылять порошок со спорами сибирской язвы над Сочи и Ново Огаревым . А вот проводить опыление полей реальных сельхозугодий частников на таком аппарате проблематично. Как и указано в заметке, крайне желательна высокая точность при полетах, а для этого нужна низкая(в определенных разумных пределах) скорость. У всякого самолета есть скорость сваливания, так что скорость будет в переизбытке. Объективности ради, надо заметить, что маневренность самолета, как правило выше, чем у МДП. Забавно, что ХАИшные инженеры пошли по такому экзотическому пути, как гибрид самолета и параплана (выделено курсивом). Тогда возникает вопрос, может не стоит зря усложнять ? Может вместо гибрида все-таки использовать МДП ? Далее. Опять замечу, что для подавляющего числа потребителей, предпочтительнее полностью автоматический сельскохозяйственный летательный аппарат. Ведь не каждый фермер имеет лицензию летчика или навыки авиамоделиста. Кстати. Система "Компьютерное зрение" - это почти готовая система самонаведения по изображению цели в оптическом диапазоне ЭМВ(электромагнитных волн). Если ПЗС-матрицу сменить, то получим ИК-диапазон или УФ-диапазон (в зависимости от ПЗС-матрицы). КР AGM-86 имеет такое самонаведение(там оно называется корреляцонным цифровым оптическим - см. раздел 5). Оптическое изображение района цели и ее окрестности бесплатно дает спутниковый картографическо-фотосъемочный сервис Гугола(точнее он - дистрибъютор этих услуг в Интернет). Для получений ИК и УФ изображений цели нужно проводить облет района цели и проводить съемку в этих диапазонах. Самонаведение по изображению цели в видимом_оптическом,ИК,УФ дипазонах обязательно необходимо, т.к. любая серъезная цель будет оснащаться(и уже оснащаются) станциями постановщиками помех в СВЧ-диапазонах(L1,L2,GSM-900,GSM-1800,CDMA,TERKOM). Например, ФСО РФ закупает такие "шумелки" трейлерами. в начало раздела -------------------- Вот прототип для нашей будущей бортовой системы помехоустойчивого самонаведения в широком диапазоне ЭМВ(видимый,ИК,УФ) и локальной высокоточной помехоустойчивой навигации(в продолжение предыдущего соображения) : "Пентагон закупил системы целеуказания AURORA на базе БПЛА Shadow [cnews] 21.01.2008. Как сообщает пресс-служба компании BAE Systems, ВС США получили пять комплексов целеуказания AURORA Generation IV на базе БПЛА Shadow. Комплекс AURORA представляет собой сверхлегкую (35 фунтов, или около 15 кг), компактную систему с широким углом обзора, в основе которой - гиперспектральный сенсор дневного наблюдения, специализированные электрооптические сенсоры высокого разрешения, а также бортовая система обработки данных, позволяющая автоматически выявлять и классифицировать цели. По словам Джона Антониадеса (John Antoniades), директора подразделений технологий дистанционного зондирования компании BAE Systems, AURORA стала первой гиперспектральной системой, принятой на вооружение армией США. Автоматическое обнаружение и классификация целей на борту БПЛА позволило значительно снизить нагрузку на операторов, которые прежде вынуждены были безотрывно просматривать большие объемы визуальной видеоинформации и принимать решения "на ходу", а также полосу пропускания, необходимую для эксплуатации системы в боевых условиях. Система может эксплуатироваться на любых БПЛА соответствующей грузоподъемности на малых и средних высотах." ----------------- (В продолжение предыдущего описания). Вот сообщение об информационных материалах, которые предназначены для системы самонаведения нашего Шахида в оптическом видимом диапазоне электромагнитных волн. Следует ещё раз отметить, что изображение цели и промежуточных опорных точек(для коррекции ИНС) могут быть ложными, а также могут изменяться по естественным причинам(например, излучина реки может менять своё положение из-за её разлива) "Газета "Коммерсантъ", №59 (4844), 04.04.2012 <<Шпиона нашли в кадастре>> Мосгорсуд рассмотрит дело о продаже секретных карт Генпрокуратура России направила в суд уголовное дело в отношении сотрудника ФГУП "Госземкадастрсъемка"-ВИСХАГИ Владимира Лазаря. Бывший офицер советской армии, имевший доступ к гостайне, обвиняется в продаже спецслужбам США секретных топографических карт России. Как стало известно "Ъ", в оперативную разработку российских спецслужб Владимир Лазарь попал после того, как в декабре 2008 года в Екатеринбурге был задержан местный 57-летний программист Геннадий Сипачев. По данным ФСБ, он через интернет передавал разведывательным структурам США секретные карты Генштаба вооруженных сил РФ, ... ... ... ...Как установили эксперты, полученные спецслужбами США топографические карты содержат сведения, содержащие государственную тайну. Передача их военным ведомствам других стран, считают в ФСБ, может нанести существенный ущерб внешней безопасности России, позволит осуществлять планирование возможных военных акций. В частности, топографические карты могут быть использованы для информационного обеспечения полетных заданий для ракет всех видов базирования, а также для подготовки и проведения сухопутных операций. Вчера замгенпрокурора Виктор Гринь утвердил обвинительное заключение по уголовному делу в отношении Владимира Лазаря, обвиняемого следственным управлением ФСБ России в государственной измене в форме шпионажа (ст. 275 УК РФ). Дело направлено на рассмотрение в Мосгорсуд. Во ФГУП "Госземкадастрсъемка"-ВИСХАГИ, где Владимир Лазарь проработал почти десять лет, от каких-либо комментариев отказались, сославшись на то, что у них "секретный объект". Олег Рубникович " ----------------- Вот еще одно сообщение в пользу дронов-МДП в сравнении их с дронами-самолетами. "Автоматизированные беспилотники охватят весь мир [cnews.ru] 16.11.10 Взлет и посадка беспилотных самолетов в автоматическом режиме позволит развернуть беспилотники по всему миру без необходимости отправлять в удаленные регионы операторов и команды обслуживания и восстановления. В настоящее время в театрах боевых действий и близлежащих регионах приходится содержать сложные дорогостоящие центры управления – в основном это автомобильные прицепы с мониторами, кабиной управления, оборудованием для связи и телеметрии. По мнению генерал-лейтенанта Филиппа Бридлоува (Philip Breedlove) из ВВС США, только автоматизированные взлет и посадка позволят максимально использовать весь потенциал БПЛА. Системы, подобные VALS, помогут заполнить небо тысячами боевых беспилотников В настоящее время автоматизированные технологии рассматриваются в качестве одного из основных способов сокращения расходов на развертывание и эксплуатацию БПЛА, а также как единственная возможность увеличения количества беспилотников, доступных для применения по всему миру. Офицеры ВВС неоднократно отмечали, что ограничивающий фактор номер один в размере флотилии БПЛА - это нехватка подготовленных операторов. Боевые командиры могут сколько угодно требовать беспилотники, но пока количество операторов ограничено, и большинство боевых беспилотных машин в ближайшее время будут сосредоточены в регионе Ближнего Востока. Отказ от сложной, управляемой вручную, процедуры взлета и посадки позволит сразу же освободить большое количество операторов, которые управляют БПЛА, взлетающими с авиабаз на территории США. Кроме того, это позволит существенно сократить финансовые затраты на персонал. В настоящее время разработку автоматической посадки и взлета ведут множество компаний и стран. Например в США на широко используемые боевые БПЛА Predator, Reaper и Scan Eagle ориентируется компания 2d3 с системой VALS. БПЛА, оснащенный этой системой, способен приземлятся в автоматическом режиме, с помощью штатных видеокамер, которые опознают наземные ориентиры в районе взлетно-посадочной полосы. Борткомпьютер определяет параметры полета и самостоятельно рассчитывает команды управления для обеспечения мягкой посадки. Широкое распространение подобных систем может серьезно расширить спектр применения беспилотной авиации и позволит оперативно разворачивать в любой точке планеты целые беспилотные эскадрильи." Любому авиатору известно, что взлет сложнее полета, а посадка сложнее всех остальных режимов. Гражданские аэропорты оборудованы инструментальной радиотехнической системой автоматизации посадки - ILS. ILS состоит из радиомаяков: курсовых, глиссадных, маркерных. Эти маяки расположены буквально рядом с ВПП (маркерный на небольшом удалении - на продолжении ВПП) , и позволяют производить автоматическую посадку самолетам с соответствующими ПНК (любой современный самолет). Также, в районе аэропортов устанавливают радиомаячные системы ближней навигации состоящие из : излучателя опорного сигнала для измерения расстояния до маяка(DME), излучателя опорного сигнала для измерения пеленга на маяк(VOR), (система VOR/DME является гражданским аналогом системы TACAN). Во времена СССР устанавливались системы РСБН(аналог TACAN) и ОСП, которые имели сравнительно невысокую точность(в основном из-за применения аналоговых принципов) и низкую надежность(из-за применения ламповой элементной базы). Многие аэропорты до сих пор используют приводные радиомаяки. Но ИКАО требует(в силу консерватизма), помимо вышеуказанного, наличия на борту робота-андроида(пилота) ... :) Как будто бухой пилот точнее и надежнее радиовысотомера(и др. бортовой аппаратуры)... :) Современные дроны-самолеты могут производить автоматическую взлет и посадку при наличии сигнала от наземных ретрансляторов GPS-сигнала с выдачей величины коррекции (Diff. GPS). Дифф. GPS выдают многократно точнее сигнал(выдаётся помимо основной информационной величины также величина ошибки от : рефракции,дифракции,реверберации, неидеальности орбиты из-за нерегулярности силы тяжести по поверхности, активных помех ионосферы). Но дифф. GPS есть не везде. А вот дрон-МДП может производить автоматические взлет и посадку при наличии штатного сигнала от GPS. Ведь дрону-МДП не нужна высокая точность позиционирования и ориентации при посадке, так как нет ограничений по ширине и длине ВПП (ВПП - любая более-менее ровная грунтовая площадка, которая есть почти везде). Посадочная скорость дрона-МДП почти такая же как скорость его снижения с выключеным мотором. При посадке без полезной нагрузки(например без ранее сброшенных авиабомб или без ранее отстреленных ракет), дрон-МДП может касаться земли просто отключив мотор. Если даже такая высокоразвитая страна, как США, не может оплатить жалование пилотов-операторов при большом их контингенте, то такая нищая недоразвитая как Кыргызстан не сможет содержать даже взвод пилотов-операторов дронов-самолетов. А значит полностью автоматический дрон-МДП - это единственный вариант для реальных ударно-разведывательных дронов(пускай и класса легкого штурмовика). Хотя, если потребуется добавить контур обратной связи от ПЗС-матрицы(любой современной видеокамеры), то это сделать очень даже просто и не заморачиваясь с согласованием, т.к. охранные видеокамеры совместимы со стандартными интерфейсами. Нужно будет уточнить корреляционные алгоритмы для многомерных массивов(в любой книжке по основам машинного зрения, кстати, корреляционные алгоритмы - наиболее хорошо проработанные) или даже, возможно пригодны аналоговые корреляторы(точнее говоря цифровые, но реализованные на неперепрограммируемой элементной базе, например на ПЛИС) с учетом заметности(оптической контрастности) искусственных ориентиров, и с учетом редкой сменяемости изображений ориентиров. ---------------------- Вот сообщение, которое льет воду на колеса мельницы закономерности перехода от дистанционного и полуавтоматического управления к полностью автоматическому управлению в авиатехнике (переход от манипуляторов к полноценным роботам). "Беспилотник X-47B будет убивать по своему усмотрению [cnews.ru] 14.04.11 Новый палубный беспилотник X-47B будет работать абсолютно автономно, в том числе применять оружие. Когда речь идет о современном беспилотном летательном аппарате, имеется виду, что на его борту нет пилота-человека, но все равно БПЛА постоянно получает команды оператора и фактически все время остается на "коротком поводке" центра управления. ВМС США хотят получить первый в истории беспилотник, способный выполнять боевые задачи самостоятельно. По скупым заявлениям на ежегодном съезде Военно морской лиги США можно сделать вывод, что X-47В не будет дистанционно управляемым самолетом. Этот беспилотник будет способен с момента отрыва от палубы авианосца выполнить задание полностью самостоятельно. Вице-президент Northrop Grumman Янис Памилянс (Janis Pamiljans), отвечающий за программу UCAS-D, рассказал о принципе управления X-47В. С момента выкатки на палубу авианосца новый беспилотник будет управляться по щелчку мыши – оператор будет только отдавать команды вроде "запустить двигатель", "на взлет", а также выбирать пункт назначения и выполняемые действия. Фактически, оператор будет только настраивать самолет перед вылетом, а после взлета X-37В будет способен самостоятельно, в режиме радиомолчания выполнить боевую задачу и вернуться на базу. "Не нужны джойстики и круглосуточные бдения в железной коробке пункта управления, - рассказывает Янис Памилянс. - Просто нажмите кнопку и 3,4 млн строк программного кода сделают всю работу за человека". Первоначально планировалось, что моделирование взлета и посадки с палубы авианосца Нимиц будет проводиться с начала до середины 2013 года, и в том же году состоится первый взлет и посадка на палубу. Для этого готовится бесшовная интеграция X-47B в системы авианосца. В ходе испытаний планируется проверить совместную работу систем обмена данными, выполнить жесткую посадку и протестировать компактные радиотерминалы операторов, работающих на палубе и управляющих взлетом и посадкой самолетов. Однако график испытаний изменился: ВМС планируют испытать самолет раньше, подготовка к запуску X-47B с палубы авианосца начнется уже в этом году. Таким образом, последний раунд испытаний будет проходить в 2014 году, когда самолет осуществит автоматическую дозаправку топливом в воздухе и успешно возвратится на авианосец. Разработчики намереваются довести совершенство автоматики до уровня клика кнопкой мыши для выполнения команды "найти танкер и дозаправится". Чтобы уложиться в этот график, необходимо иметь высочайший уровень резервирования и надежности, поскольку в настоящее время Northrop располагает только двумя X-47B и не планирует строить больше. Единственное, что пока остается неизвестным - это время и порядок испытания вооружения X-47B. Однако разработчики предельно ясно озвучили порядок применения оружия новым беспилотником. На вопрос, каким образом будет производиться пуск ракет и сброс бомб, прозвучал ответ: "X-47B будет на автопилоте 100% полетного времени". Видимо, это не означает, что американские военные отказались от идеи вооружить основу будущей ударной мощи своих авианосцев. Судя по всему, в будущем войны сведутся к клику мышкой на пункте "уничтожить бронетехнику такой-то страны" или "очистить акваторию от кораблей", а командирам останется только наблюдать за войной боевых роботов. Автономность ударных самолетов открывает большие перспективы. Для того чтобы управлять сотней современных БПЛА (авиакрыло авианосца) нужно 200 операторов, при этом для круглосуточных продолжительных боевых действий им нужна смена. С авиакрылом X-47B сможет справиться десяток операторов, что позволит с минимумом затрат людских ресурсов вести дешевую войну практически любой продолжительности и непрерывно, годами, бомбить врага. При этом потери своих войск в живой силе будут нулевыми." Наша разработка, Шахид-1, как это не парадоксально, имеет большие шансы на коммерческий успех именно в варианте робота с вспомогательными возможностями манипулятора. Что самое непостижимое, так это то, что в кустарных условиях намного эффективнее клепать робот, нежели манипулятор. Любой, кто работал регулировщиком радиоаппаратуры на заводе и(или) что-нибудь разрабатывал и паял самоделку дома, знает, как дорого и хлопотно оснащать даже простенькую домашнюю радиолюбительскую лабораторию, а вот купить бэушный дэсктоп и склепать программатор для внутрисистемной прошивки атмеги - тривиальная и дешевая задача. Также повторю предыдущую мысль о предпочтительности автоматической техники, по сравнению с автоматизированной, для неграмотных пользователей. Ведь моджахэддинам,нукерам и феллахам некогда читать какие-то бумажки инструкций, им бы коран научиться цитировать :))) ... Опять, уже в который раз, приходим к выводу, что : дэхканам, нукерам, кабальеросам, мучачосам, феллахам, пацанам, ваххабытам, суфиям, анархистам, токфэрытам, салофытам, чувакам, неформалам, карбонариям, комбатантам, инсургентам, партизанам, масонам, подпольщикам, джигитам, талыпам, мюридам, моджахэддинам, шейхам, асасинам, челкашам, дэрвышам, народным мстителям, и даже эмирам!(иногда) крайне необходим робот-мотодельтаплан. ---------------------- О некоторых существующих тенденциях и процессах. Турция производила лицензионные F-16 с 80-х годов. Потом она затребовала исходники софта бортовых ЭВМ, для(в том числе) выявления возможных кодов ИКМ в радиосигналах от внешних РЛС, распознаваемых бортовой ЭВМ как секретные команды, точнее как секретные операнды команд(не указанные в документации переданной туркам). Американцы их послали куда подальше. Турецкие инженеры были вынуждены полностью (заново!) переписывать софт. Теперь турки требуют передачи софта на F-35. Результат будет тем же. Перефразируя Наполеона, можно утверждать: 1. Кто не хочет кормить своих программистов, тот будет кормить чужих и к тому же будет отсасывать у них :) . 2. Чтобы остаться в категории хотя бы малоотсасывающх, нужны три вещи : (программисты+деньги) + (программисты+деньги) + (программисты+деньги) . Ведь как говорили древние римляне ? - "Хочешь мира? Готовься к войне!"(с) ... А они в таких делах хорошо разбирались ... Далее. Известно, что торговать чистым софтвэром очень трудно (точнее трудно много заработать на такой продаже). Это удается только гигантам ("Microsoft"(c), "Borland"(c), "Oracle"(c) , etc.) , либо блатным фирмам (в малоразвитых странах) , которые впаривают госорганам готовые программные пакеты, выдавая их за свое программное изделие (легче застрелиться, чем объяснить чурке-башкарме, что сложность созданного тобой софтвэра почти никак не связана со скромностью его интерфейсной части, а в это время какой-нибудь русско-еврейский гений(с) торгует красочными кампутэрными картинками... :( ). Намного легче впаривать в одном флаконе - торговать комплексным законченным изделием (вот тут чурка-башкарма, возможно, на своей заднице ощутит трудоемкость). Так что простой дрон - это один из немногих вариантов продукции для многих мелких фирм в малоразвитых странах, которые не имеют блата и потому вынуждены зарабатывать своим интеллектуальным трудом. ---------------- И еще немного мудрения. Великий Станислав Лем в своей "Лунной Гонке" предугадал(как это он всегда умел) картину глобальной роботизации. Еще удивительнее, что он точно указал на ключевую фигуру роботизации - программиста. Хотя любой грамотный технарь знает афоризм: "Программист - это солдат второй промышленной революции"(с), все равно трудно переоценить трудоемкость софта. Итак, суть и ценность робототехники - софт. По аналогии с вычислительной техникой, где соотношение стоимости харда и софта примерно соответствует соотношению стоимости упаковки и товара в этой упаковке, робототехника приходит к такой же закономерности. Шахид - это материализованная тенденция, указанная выше. Робототехника - это второй вираж спирали глобального технико-социального прогресса последнего столетия. Первый вираж - это ЭВМ и информационные сети. Робототехника, в отличии от просто глобальной информатизации, по-сути ориентирована на физическое, как правио механическое, воздействие. Любой упорный и грамотный программист или группа программистов могут практически анонимно, либо посредством ничего не понимающего быдла оказывать физическое воздействие на очень важных людей, или их родственников, или запугивать миллионы людей(тоже самое быдло, которому только хлеба и зрелищ). Ешё один интересный аспект робототехники - последействие и неощущаемая причинно-следственная связь. Оружие и вооружения все более отделяются от оператора и тем более от программиста. Это приводит ко всё большему стиранию ощущений при использовании оператором вооружений. Этот психологический аспект давно исследуется в военной психологии, но теперь, когда любой грамотный технарь может изготовить дальнедействующее автоматическое вооружение - коими по-сути являются многие транспортные роботы, это становится повседневностью. Опять до кучи, заметим, что неграмотному джигиту трудно освоить навыки стрелка-оператора дистанционно управляемого вооружения, для него намного предпочтительнее полностью автоматическое вооружение. Общеизвестный факт, когда моджахэддинов в Афганистане пытались обучить применению ПЗРК "Блоупайп", ракету которого нужно дистанционно наводить на цель посредством шарикового манипулятора, то результаты были весьма посредственными. А вот, когда моджахэддинам стали поступать ПЗРК "Стингер", которые полностью автоматические (концепция "выстрелил_и_забыл"(с) ), то русские стервятники(Ми-8) стали намного трусливее. Далее. Авиационная робототехника - самая многообещающая сфера деятельности для отдельных технарей и группировок из них. Менты и гэбнюки (и прочие цепные псы сильных мира сего) с легкостью лепят блок-посты и всяческие шлагбаумы на въездах во всяческие вип-городки и Ново Огаревы. А вот как им закупорить воздушный океан над Бочаровым Ручьем ? Теоретически, они могут навесить аэростаты заграждения... :) Кинорежиссеры и продюсеры сэкономят кучу бабла на антураже для съемок художественных фильмов о военной Москве 1941,1942 годах... :) Но если эту сеть будет кто-то чем-то рвать(жечь) или будет аэростаты дырявить ? :) Понятно, что "резак" должен быть эффективным и обязательно дешевым, и таким резаком буквально являлись самолеты-снаряды "V-1" ("Фау-1"), ихнии передние кромки крыльев были остры и перерезали сети аэростатов заграждения над Лондоном. Кстати, авиароботы уже несколько лет как сторожат границы и территории многих стран. Во будет прикольно зырить за Предатором, гоняющимся за Шахидом :) . Еще замечу, что себестоимость оборонительной системы на несколько порядков больше любой эскадры Шахидов. Ведь атакующие повелители Шахидов (какой поэтический, но при этом технически точный образ !) обладают эффектом внезапности и полного владения инициативы (можно произвести ложные прорывы, т.е. иммитацию атаки, и выманить обороняющихся на задействование всех их ресурсов по ложным секторам, а самим в это время послать настоящих ударных Шахидов в уже оголившиеся участки...) Далее. Потребность в Шахидах значительна и будет всегда, т.к. всегда были и будут группы угнетаемых и несвободных индивидов, а таковые были и будут всегда(хотя другие будут иного мнения о таковых). Самый заметный пример - это народы(этносы) не имеющие равноценной с другими этносами отдельной государственности. АНК застрелил Питера Боту из обычного карабина, чечены застрерлили Буданова из револьвера, но те же чечены постоянно ищут (в этом нет сомнения) отомстить альфа-догу(с) и всей родине_слонов(с) за многократные массовые их истребления и в конечном счете за очередное (черти какое по счету) завоевание Ичкерии и лишения чеченов международной государственности, так сказать очередное добровольное_вхождение_в_состав(с). Возможно, чечены охотятся за дочками альфа-дога(с), либо за продуктами деятельности сперматазоидов альфа_дога(с). Так что сбыт обеспечен ! в начало раздела ----------- "Дирижабль в системе ПРО: новый наблюдатель готов к работе [cnews.ru] от 21.02.2012 Компания Raytheon завершает испытания дирижабля раннего обнаружения атакующих крылатых ракет Joint Land Attack Cruise Missile Defense Elevated Netted Sensor System (JLENS). ... Дирижабли JLENS имеют массу преимуществ по сравнению с традиционными наземными радарами и самолетами ДРЛО. Прежде всего, они способны с большого расстояния надежно обнаружить низколетящие крылатые ракеты и самолеты. К тому же, цена и стоимость эксплуатация дирижаблей намного ниже, чем аналогичные показатели у, например, самолетов дальнего радиолокационного обнаружения E-3A/B Sentry." Такие гандоны с моторчиками будут со временем висеть вокруг резиденций различных бугров. Чуть попозже, после того, они будут висеть везде. Так что, для клепальшиков Шахидов, кусок хлеба с маслом гарантирован :))) . Следующие важные выводы следуют из процитированного выше сообщения . Во-первых. МДП имеет более чем приличную ветроустойчивость. Ведь МДП - тяжелее воздуха, а дирижаюль - легче воздуха, а для задач ПВО/ПРО (ДРЛО) крайне необходима высокая вероятность обнаружения цели (низкая вероятность пропуска цели), а значит дирижабль достаточно ветроустойчив. Во-вторых. Для задач массовой надежной ПВО/ПРО (обнаружение,сопровождение,целеуказание) МДП весьма и весьма хорош. Ведь дирижабль стоит сушественно дороже, чем МДП. Площадь оболочки у дирижабля намного больше площади крыла МДП, и оболочка баллона дирижабля должна иметь очень хорошую герметичность => более дорогая ткань(и гелия много на Солнце, но в атмосфере Земли с ним напряжёнка). В-третьих. Вояки тоже умеют считать деньги (кроме случаев, когда их контролируют кретины с гуманитарным образованием). Особенно с учетом постоянной конверсии и реконверсии. В-четвертых. Только идиоты-дилетанты рассматривают решение той или иной проблемы по принципу "все, или ничего"(c) (типа подросткового перфекционизма) . Что подразумевается под этим ? А вот что. Известно, что крылатые ракеты (дурацкий термин, но он прижился и потому его приходится использовать) существуют уже лет семьдесят. Для борьбы с КР успешно используют самолеты ДРЛО (например "Хоккай", А-50). Но используют ДРЛО, как правило, в угрожаемый период (война, угроза внезапного нападения), по угрожаемым направлениям (направления возможных вторжений) или для обороны стратегических объектов (объектовая ПВО/ПРО). Но как можно понять из вышепроцитированной заметки, намного рациональнее применять комбинированный подход : когда не бушуют ураганы - то запускать дирижабли, а если будут сильные ветра - то использовать самолеты ДРЛО. ----------------- Из "Независимой Газеты" [nvo.ng.ru] "Икары Абхазии" (Использование мотодельтапланов в современной локальной войне стало обычным явлением) 1999-09-17 / Михаил Павлушенко, Вячеслав Хромых : "...Пилоты-дельтапланеристы сразу же приступили к оборудованию спортивных машин в боевые: установили замки бомбосброса и радиостанции, крылья перекрашивались в защитный цвет, место пилота, бензобак и двигатель бронировались титановыми пластинами, доработана подсветка приборов для ночных полетов. После этого были проведены летные испытания, и в течение 10 дней стала отрабатываться тактика боевых полетов. Пилоты тренировались в бомбометании. Отклонение бомбы от точки прицеливания составляло 30-40 м с высоты 500-700 м. Затем были испытаны различные образцы авиабомб. Интересно, что их сконструировали сами пилоты. Впоследствии уже второй набор пилотов создал устройство и отработал тактику ковровых бомбардировок. В высокогорных условиях Абхазии мотодельтаплан с одним пилотом поднимался на высоту 4,5 тыс. м, с двумя - на высоту 2,5 тыс. м. Бомбовый удар строился следующим образом: на расстоянии около 10 км от цели пилот набирает высоту 2 тыс. м и планирует на объект с задросселированным двигателем. После сброса бомбы пилот с одновременным набором высоты уходит в безопасном направлении. Планировалось использовать мотодельтапланы не только для разведки и бомбометания, но и для доставки спецгрупп в тыл противника и поисковых работ. Обсуждались вопросы применения этих аппаратов для корректировки артиллерийского огня, проведения спасательных работ, в качестве ретранслятора в условиях гор. Тактика строилась на задействовании мотодельтапланов только в ночное время в районе прифронтовой полосы. ..." Мои соображения. -1- В то время не было точной ночной навигации и у них не было в экипаже отдельного бомбардира с его аэродинамическо-баллистическим вычислителем, но пилоты ухитрялись с высоты пол-километра попадать в такой маленький кружок ! Уму непостижимо ! Если будет наш Шахид с его компьютером и GPS-ом, в которых программный "виртуальный_бомбардир"(он исполняется в УЭВМ, см. техническую документацию), то точность при бомбометании будет в разы выше ! С высоты в один километр, в ночное время, можно будет бомбить с КВО =< 10 м !!! -2- МДП марки Т-4, оборудован мотором мощностью примерно 30 л.с. , в то время это был довольно распространенный МДП, кстати его клепали на военном авиазаводе в Киеве - "Киевский механический завод". И получается, что всего тридцать лошадей давали высоту 4,5 км с одним балластом (пилотская задница, с его очками, весят кило под сто) , если убрать пилота, то высота будет 5,5...6 км ! Но это уже очень даже серъезные высоты, можно вести скрытный шпионаж в дневное время, с полным обзором(а не только боковым) без опасности быть замеченным или услышанным жертвой. Альфа-дог(с) внезапно обмочится :) , или его обмочат-замочат в сортире(с)... -3- Использование МДП в качестве высотного ретранслятора, может быть еще более эффективным, в случае дрона-МДП. Высота барражирования будет больше, продолжительность барражирования будет больше, максимально допустимая масса аппаратуры ретранслятора будет больше, длительность непрерывной работы ретранслятора будет больше, и т.д. -4- Абхазские сепаратисты, при поддержке России (например Шамиль Басаев был командиром батальона "Кавказ", и полностью был на снабжении русской гэбни, состоял даже в штате ГРУ) ухитрялись даже клепать самопальные авиабомбы ! Как тут не подивиться народной находчивости и смекалке :) ... -5- Я полагаю, что: дэхкане, нукеры, кабальеросы, мучачосы, феллахи, пацаны, чуваки, масоны неформалы, карбонарии, комбатанты, инсургенты, партизаны, подпольщики, народные мстители, джигиты, робин-гуды и прочие уважаемые люди обучились изготовлению самопальных боевых авиабомб; благо, что Интернет сильно облегчает копание с необходимой инфой. Но вышеуказанные достойнейшие господа имеют проблемы с дешевыми,простыми средствами доставки(с), и те фирмачи, кого осенит сея несложная мысль, имеют весьма неплохие шансы соответственно навариться на внедреже этой очевидной идеи, при этом, особо не рискуя. Хотя, на родине_слонов(с) всем рулит экс главный гэбнюк (он же альфа-дог(с) , вы вероятно догадались) и ихнии суды уже давно стали филиалами доблестных органов (не тех, из которых мы все появились на этот свет :)..., хотя в народе, "охранка"(c) - был и остался весьма поганым термином едва ли респектабельнее термина "пи...юки" :) ) в начало раздела ----------------- Из "Иркут-850" : "...Комплекс состоит из двух опционально пилотируемых мотопланеров Stemme S-10VT, наземной системы управления и средств технического обслуживания. ..." Через пять лет аналогичный подход применили французы, для создания своего БПЛА "Патроллер". Еще двадцать лет назад, ПНК для самолетов стоили так дорого, что их ставили только на дорогие модели. Теперь, современный,надежный,высокоточный ПНК рентабельно ставить даже на мотопланеры. ----------------- Из "Забытые крылья спецназа..." автор Сергей Евтехов : "...Тогда, в 1982 году, Центр сверхлегких летательных аппаратов при Киевском механическом заводе (ныне ОКБ авиации общего назначения) получил заказ от ГРУ на создание специализированного мотодельтаплана. ... ...У нас тоже рассматривались различные варианты воздушного носителя - от автожира (типа "Джайрокоптер" Bensen B-8HD) и сверхлегкого вертолета до различных реактивных платформ и паромоторов. Но схема мотодельтаплана (МДП) оказалась более жизнеспособной из-за удовлетворительных летных характеристик, малого расхода топлива, сравнительно низкой стоимости аппаратов (от 6 до 12 тысяч долларов), невысоких требований к квалификации пилотов и относительной безопасности полета, а самое главное - возможности крупносерийного производства. Конечно, МДП имеет недостатки - зависимость от погодных условий, приличные нагрузки на руки, дискомфорт и необходимость экипажу хорошо утепляться при полетах зимой. Однако они с лихвой перекрываются достоинствами, как и подтвердилось позже. В числе общих требований к разработчикам были и необычные: создание одномоторного двух- и четырехместного легкоразборного аппарата, компактного при хранении, с возможностью подъема через рубочный люк подводной лодки и перевозки в десантных отделениях БМП и БМД. Объединить все эти противоречивые требования оказалось непросто. Экспериментальные аппараты получили шифры Т-2, Т-4 и Т-6. В ходе проектирования и испытаний были отработаны малошумные винты, глушители впускного и выпускного трактов двигателей. Было достигнуто значительное снижение ИК сигнатуры и аэродинамических шумов. Об оптической и радиолокационной малозаметности аппаратов говорит такой факт, как неоднократные незарегистрированные пролеты МДП через реальные рубежи ПВО. Расчеты радиолокационных станций могли скорее засечь его визуально, чем при помощи РЛС. Шум при полете на малом газе был похож на автомобильный, а на взлетном режиме был похож на мотоциклетный. Наибольшие успехи были достигнуты в разработке двухместного МДП. К концу испытаний это был аппарат с поперечным расположением экипажа, силовой установкой Rotaх-582 (64 л.с.), площадью крыла около 20 кв. м, максимальной скоростью до 130 км/ч, скороподъемностью до 3,5-4 м/с, расходом топлива до 10 л/ч, полезной нагрузкой до 180 кг, допустимыми перегрузками +5;-3, перегоночной дальностью до 350 км. Аппараты готовились как универсальные носители личного состава разведгрупп (РГ), и как средство переброски тяжелого вооружения (СПГ-9М и 9 выстрелов ОГ-9, ПУ ПТУР и 6 ракет, других изделий) с одним пилотом. Согласитесь, разведгруппа, имеющая возможность с дальности до 4000 м обстрелять из СПГ-9 аэродром или другой объект и через несколько минут улететь с огневой позиции, становится особенно опасной. Многократно выполнялись боевые задачи с ведением огня в воздухе из АО-44 (АПБ), АК-74, АКМ с ПБС, ПКМ. При этом из-за вибрации эффективная дальность огня уменьшалась всего на 30%. Автором для доказательства возможности ведения эффективного огня в воздухе были неоднократно выполнены упражнения контрольных стрельб (УКС из КС-76) из АКМ, АК-74, ПКМ. Причем мишени приходилось поднимать одновременно из-за большой скорости сближения с ними. Необычайно сильное впечатление на высший командный состав произвел показательный полет МДП. Экипаж аппарата спланировал с малошумным двигателем с высоты 500 м до 20 м, поразил из бесшумного оружия четыре ростовых мишени в 100 м от группы офицеров и растворился в небе. Из 20 опытных офицеров, имеющих богатый боевой опыт, большинство так и не поняли, что и как произошло. Также было доказаны возможности ведения огня с мотодельтаплана из АГС-17 и НСВТ-12,7 (только короткими очередями) по площадным целям. Испытания показали и реальность взлета с палубы подводной лодки и крыши БТР-Д на скорости 40-50 км/ч. Самое серьезное внимание уделялось разработке и практической проверке тактических приемов. Прежде всего, подходам к цели по профилю большая - малая - большая высота, уничтожению точечных объектов, способам переброски РГ и тяжелого оружия в новый район, полетам в группе, способам хранения МДП в крупногабаритных тайниках, эвакуации раненого или пленного. Много времени уделялось полетам в темноте с очками ночного видения НПО-1"Квакер" и посадкой на неподготовленную площадку с помощью осветительных ракет. Прорабатывался вопрос оснащения МДП поплавками. ... ...Как-то подсчитали, что для полного удовлетворения всех потребностей военной разведки в МДП нужна сумма, равная стоимости полутора танковых батальонов. И неизвестно, что было бы опаснее для противника: меньше полусотни танков, или несколько тысяч диверсантов, практически безнаказанно действующих у него в тылу и легко ускользающих при проведении контрразведывательных мероприятий. Сегодня, в условиях дефицита денежных средств, необычайно актуально применение МДП в Чечне: в режиме ретранслятора, носителя спецаппаратуры и как патрульного средства. Поразить аппарат, пилоты которого защищены жилетами 5-6 -го класса, а двигатель имеет площадь проекции не более 20 кв. дм, с дальности 1500-2000 м огнем стрелкового оружия очень проблематично, а ночью невозможно. Пускать дорогостоящий ПЗРК бессмысленно. В свою очередь, экипаж МДП, используя приборы ночного видения и оптические приборы со стабилизированным полем зрения, магнитометры, может легко обнаружить технику, базы противника, его перемещение, корректировать огонь артиллерии и решать многие другие задачи. ... ...За время абхазо-грузинского конфликта при боевом использовании абхазцами мотодельтапланов критерий "эффективность-стоимость" превзошел все ожидания. Следует учесть, что уровень их аппаратов, переделанных из спортивных, ни в какое сравнение не шел с киевскими, специально спроектированных и построенных как боевые МДП. В настоящее время мотодельтапланы производятся девятью фирмами в СНГ. В мирных целях аппараты могут широко использоваться в сельском и лесном хозяйствах, экологическом мониторинге, при охране границы, общественного порядка, и в ГИББД. Они могут решать целый ряд задач: ультрамалообъемное опрыскивание, аэрофотосъемку, осмотр ЛЭП и многое, многое другое. Боевое применение мотодельтаплана - это очень перспективная тема, тем более учитывая прошлый опыт. Надеюсь, МДП снова будут востребованы." Мои выводы. Пилотировать МДП существенно проще, чем самолетом, значит легче обеспечить надежную работу автопилота и бортовых сервоустройств, проще внедрить резервирование. Вибрации будут незначительны, скорее всего пассивная стабилизация(демпфированием) обеспечит нужную точность для стрельбы НУРСами и кино-фото-съемок. Достаточная динамика МДП позволяет его использовать в качестве штурмовика, и в беспилотном варианте. В самом деле, автопилот(а точнее вся САУ) выполнит те же виражи,развороты и дросселирование с последующим переходом на максимальный газ, что и живой пилот. Скорее всего, автопилот это сделает в среднем точнее. Многие недостатки МДП связаны с низкой эргономичностью. При длительных полетах, типа барражирование или бомбардирование дальних целей, а тем более ретрансляция, летчику будет тяжело. Если надо висеть в воздухе непрерывно часов пять...десять, то даже посрать и поссать будет сложно. Бросишь ручку, только начнешь расстегивать ширинку, а тут вдруг некий форс-мажор... Если холодный ветер к тому же, то трудно даже ширинку расстегнуть в толстом комбинезоне, так и будешь летать засранцем(поэтому бабы редко идут в военные лётчицы, где нужны длительные сидения в одном кресле :) ). Далее. Модная фишка - сетецентричные системы вооружений и разведки. МДП хорошо подходит, а беспилотник на его платформе - вообще идеален для такой перспективной темы. Одноместный МДП стоит очень дешево, но если их пускать роем над оперативным районом, то пилотов не напасешься. В противоположность этому, те же десяток дешевых дронов-МДП с ретрансляторами на борту смогут обеспечить надежный прием и передачу радиокоманд и разведиформации на наземный пункт управления. При этом, можно обойтись без дорогой аппаратуры спутниковой связи, и тоже дорогой аренды каналов спутниковой связи. А более скоростные дроны-МДП, возможно в режиме ДПЛА, то есть с дистанционным управлением, могут убивать противника управляемыми авиабомбами(УАБ) и ракетами класса "воздух-земля"(типа УР "Хеллфайр" или УР "Мейверик"). в начало раздела ----------------- Резюмируя этот раздел, добавлю еще один факт. В Интернете есть оупэн-сорс и вся прочая необходимая техдокументация на беспилотные вертолёты,самолеты,мотопарапланы и т.д. Разумеется, я использовал их, предварительно вникнув и разобравщись. Американские подростки, зачастую тратят тысячи долларов(каждый) на изготовление полностью автономных дронов авиамодельного(и натурного) типоразмера. Я(мы) решил потратить пятьсот баксов на изготовление дрона "взрослого" типоразмера. Моё удивление. Меня поражает тупость и бестолковость здешних начальников и правителей. Они не могут организовать системное интегрирование(попросту собрать в кучу) уже готовые материалы, максимум их мозгов хватает на вылизывание жопы русским паханам...
в начало страницы мотодельтаплан, дельталет, cruise, наркотики, МДП, White House, ДП, дрон, чечен, olympiad, Афганистан, БЛА, беспилотный, Шахид, NMEA, ШАХИД, хуй, параглайдер, Ичкерия, парамотор, пизда, парафойл, картинка, Olympian, фото, cruise, вид, Имарат, внешний, полет, GPS, пуштуны, характеристики, Путин, данные, выгодный, эмир, дешевый, доступный, ислам, Bush, эффективный, террор, ебать, терроризм, самодельный, доступный, моджахед, explosive, сельскохозяйственный, изотопы, авиация, любительский, военный, сверхлегкий, Аллах, БПЛА СЛА, ультралайт, ultra light, героин, русская, ultra-light, ultralight, Кремль, Коран, Ultra Light, Сочи, plane, талибан, выебу, airplane, Людмилу, kill, Олимпиада, paraglider, UltraLight, жопу, дельтаплан, drone, террорист, UAV, Путину, robot, Сочи-2014, bomb, яды, fuck, параплан, сибирская язва, Sochi-2014, Sochi, Бочаров Ручей, навигация, Доку Умаров в начало страницы
9. ФАНТАЗИИ И МЕЧТЫ И ПРОЧИЕ КОММЕРЧЕСКИЕ ФУТУРИИ Тут изложено сияющее далекое послезавтра (в стиле Жюль Верна и Конан Дойля). Некоторые тенденции и простые физические явления: 1. Доля минеральных ресурсов, добываемых со дна морей и океанов постоянно растет. 2. Ударная волна в плотной воде в тысячи раз разрушительнее, чем в воздухе. 3. Контроль доступа под водой несоизмеримо труднее и дороже такового на поверхности суши, поверхности воды и даже, чем на высоте, в атмосфере. 4. Все больше трубопроводов прокладывается на дне морей и океанов. А что если попытаться изготовить полностью автоматическую ныряющую подводную лодку-торпеду - эдакий подводный робот-Шахид ? Такие изделия уже изготавливаются различными фирмами и университетами, для военных, коммерческих и исследовательских целей. Мой подводный Шахид предназначен для диверсий на подводных трубопроводах и буровых(добывающих) платформах. Назовем изделие "Шахид-2". Главная техническая проблема изделия - длительная подводная автоматическая навигация. Решение проблемы - навигация по GPS при кратковременном всплытии, а как дополнительная навигация - навигация по рельефу дна. Рельефные донные карты, вероятно, есть в открытых источниках (для исследователей: океанографов,гидрологов,гидрогеологов и т.д.) . Большую часть пути "Шахид-2" идет на небольшой глубине - 50...100 метров, на такой глубине его не видно сверху, он не повредится надводными судами(но может наткнуться на рыболовные сети, поэтому он уходит в сторону от приближающегося судна, проэкстраполировав его и свою ожидаемую траекторию, траектория надводного судна определяется им посредством измерения уровня и пеленга гидроакустических сигналов издаваемых надводным судном). При подходе к району цели, "Шахид-2" всплывает и идет в наполовину погруженном положении. Его верхняя поверхность малозаметна в оптическом видимом диапазоне(маскирующая окраска), и малозаметна в диапазонах СВЧ. Его нижняя поверхность малозаметна для сонаров(гидролокаторов). Его движитель - водометный (низкий уровень гидроакустических шумов). Источник энергии для маршевого привода - водородные топливные элементы(пока они довольно дорогие). Среди бортового оборудования, гидролокаторы - для автоматических съемок рельефа дна (и автоматического вычисления погрешности ИНС - аналогично радиовысотомеру в TERCOM), магнитометры - для выявления трубопровода для его последующего подрыва. Кстати(немного прикола и хроники). Одни из первых самолётов-снарядов назывались "воздушными торпедами" . Например изделие под названием "Воздушная торпеда конструктора Никитина" :) . Интересно соотношение между отношением различных государств к воздушным и подводным торпедам. В тех странах, где нет засилия гэбни(например США,Канада) отношение к воздушным и подводным торпедам одинаковое, в смысле их секретят/не_секретят в одинаковой степени . В тех странах, где рулит гэбня (Россия,Казахстан) и соответственно верховный бугор(Путин, Назарбаев) постоянно трясутся о своей заднице, о своём кресле, о заднице своих отпрысков, так вот в этих деспотиях намного больше секретят воздушные торпеды (дроны) . Прикольно отслеживать бесконечную эпопею под названием "Закупка в Израиле беспилотников и заводов по производству беспилотников" . Усраться можно с того, как русские генералы топают ножками и требуют, чтобы наконец армии русни начали оснащать эскадрильями БПЛА, а в это время тихушники гэбнюки запускают попеременно две утки, первая утка - "У евреев отличные беспилотники, и поэтому надо покупать дроны в Израиле", вторая утка - "Мы гордые и умные, поэтому сами будем делать БПЛА" . Со стороны, русское(и нерусское) быдло (для которого гэбня и разыгрывает комедию) напоминает ишака, которому гэбнюки то показывают морковку, то прячут эту морковку :) :) :) :) ... Ебать-копать... это же как сильно нужно позориться, чтобы так сильно презирать своих инженеров и рабочих... Вот уж действительно поганая и подлая профессия - "Госбезопасность" . Вот упоминания о прототипах : "Подводные роботы будут патрулировать мировой океан. [cnews.ru] 11.08.11. Американские военные моряки запустили новую программу LDUUV по разработке подводного робота, который сможет выполнять длительное автономное патрулирование. Новый робот будет иметь автономность не менее 70 суток, для сравнения: атомная подлодка класса Virginia с экипажем более 100 человек имеет автономность 90 суток. При этом аппарат LDUUV будет полностью автономным и сможет самостоятельно избегать препятствий и выполнять миссии в сложных условиях оживленного судоходства. ..." "Нужен ли военным корабль-подлодка? [cnews.ru] 09.12.11. На выставке LIMA-2011 компания DCNS представила смелый проект уникального надводного корабля, который способен погружаться под воду и действовать, как субмарина. ..." "Американцы предъявили миру корабль-призрак. [cnews.ru] 15.08.11. ВМС США сняли гриф секретности с боевого стелс-корабля GHOST. Фотографии секретного военного судна производства компании Juliet Marine Systems опубликованы впервые, и общественность может ознакомится с обликом уникального корабля, который был разработан в инициативном порядке для выполнения особо сложных скрытных миссий. ..." -------------------------- Очевидный вопрос о резонах. Схема получения прибыли ? Она следующая. Посылаем первый подводный Шахид, подрываем трубу. Диктуем эксплуатантам срок в течении которого они должны уплатить, если они отказываются, посылаем второго Шахида, и так далее, в общем тот же рзкет, но в гигантских масштабах. Украина,Беларусь сильно теряют в своих транзитных доходах от подводных обходных магистралей. США сильно пострадали от аварии платформы корпорации "Бритищ Петролеум(Бейонд Петролеум)" . Понятно, что многие не откажутся от услуг изделий "Шахид-2". Многие морские развитые страны и могущественные корпорации имеют службы морской разведки и контрразведки, но не могут же они следить за каждым кооперативом или артелью ? Предположим даже, что, например военно-морским разведке и контрразведке удалось, с большим трудом, частично отследить цепочку изготовления и применения изделий типа "Шахид-2". Дальше им нужно доказать обвинение в суде - это невозможно, если кооператив для отмазки клепает какие-нибудь прогулочные навороченные субмарины, которые снабжены гидролокаторами, автоматическими навигационными устройствами, бортовыми ЭВМ. Тут, морская разведка будет попросту убивать кооператоров и артельщиков. Что поделаешь - "кто не рискует, тот не пъет шампанское"(c) . Профессор Мориарти, как известно, погиб(в борьбе), но и Шерлок Холмс тоже умер... от старости... Кстати, более подходящий персонаж(вместо прохфессора Мориарти) - инженер Гарин. Ведь "Шахид-2", как и "Шахид-1", не являются свежими продуктами каких-либо исследований и открытий в физике, математике или химии. Все уже давным-давно открыто и исследовано великими научными работниками в области акустики, механики, теории_информации, теории_электромагнитного_поля, аэродинамики, гидродинамики (Ньютон,Шэннон,Винер,Архимед,Гюйгенс,Галилей,Герц,Тьюринг,Максвэлл,Прандтль, Нуссельт,Бернулли,ля Плас,Фурье). Нужно лишь внедрить в техническую область достижения тружеников науки. Не знаю, кого как, а меня тошнило и тошнит от чурок,чучмеков,мырков и прочих обезьян, которые писали (и до сих пор портят бумагу) на монографии типа "Научные Достижения Фундаментальных Исследований заводов саманных кирпичей" (точнее, эту хуйню им варганили полуголодные тощие аспиранты :) , как тут не вспомнить щутку Ландау об ученом коте :) ) . Мечта многих полуграмотных бездельников - изготовление атомной бомбы. К сожалению, для решения этой задачи, требуется не менее нескольких десятков миллионов долларов. Не открыт пока дешевый природный источник расщепляющихся материалов, увы. Единственный шанс заработать много денег и(или) удовлетворить комплекс Герострата - это шантаж и рэкет корпораций и целых государств, посредством использования заинтересованных тайных обществ. При этом, транспортная робототехника - самая подходящая(если не единственная) область, так как почти любое ее изделие - двойного назначения, и при этом дешево и доступно для полукустарного производства.
в начало страницы мотодельтаплан, дельталет, cruise, наркотики, МДП, White House, ДП, дрон, чечен, olympiad, Афганистан, БЛА, беспилотный, Шахид, NMEA, ШАХИД, хуй, параглайдер, Ичкерия, парамотор, пизда, парафойл, картинка, Olympian, фото, cruise, вид, Имарат, внешний, полет, GPS, пуштуны, характеристики, Путин, данные, выгодный, эмир, дешевый, доступный, ислам, Bush, эффективный, террор, ебать, терроризм, самодельный, доступный, моджахед, explosive, сельскохозяйственный, изотопы, авиация, любительский, военный, сверхлегкий, Аллах, БПЛА СЛА, ультралайт, ultra light, героин, русская, ultra-light, ultralight, Кремль, Коран, Ultra Light, Сочи, plane, талибан, выебу, airplane, Людмилу, kill, Олимпиада, paraglider, UltraLight, жопу, дельтаплан, drone, террорист, UAV, Путину, robot, Сочи-2014, bomb, яды, fuck, параплан, сибирская язва, Sochi-2014, Sochi, Бочаров Ручей, навигация, Доку Умаров в начало страницы
10. ШУТОЧКИ "Во всякой шутке есть доля ... шутки..."(c) ------------------- Так шутят некоторые (но только не из нашего района(с) ... пока(с)... ) . Предлагаю вам немного поразвлечься шуточной игрой-викториной "резюме автора" (правила игры смотрите внизу - под игрой): Игра "Резюме автора" написана на языке Ява в 2001 году. Игра представляет собой Ява-апплет. Игра выполняется во всех операционных системах, которые древнее "Windows XP"(c) (В 2000 году, "Sun microsystems co."(c) все-таки отстояла свое детище от захвата "Microsoft"(c)). Для выполнения игры в "Windows XP"(с) нужно инсталлировать в ней "Ява виртуальную машину"(JVM) либо инсталлировать "Ява оболочку времени исполнения"(JRE) (JRE содержит в себе JVM). Игра не доделана до конца, поэтому далеко неидеальна. Ява виртуальная машина, при первом старте игры, может чуть тормозить систему, поэтому при первой загрузке и запуске игры(игра запускается автоматически), желательно выждать с пол-минуты. Игра полностью готова к обслуживанию вас, когда появляется фотография автора и ниже - четыре зеленых шестиугольника с вопросами. Цель игры для автора - самореклама (сам себя не похвалишь, так никто тебя и не прикормит). Вы должны прочесть жизнеописание автора и нажать курсором мыши на соответствую правильную надпись в зеленом поле кнопки-шестиугольника. После нажатия на зеленую шестиугольную кнопку, вместо позирующего автора возникает и крутится мультик (прокручивается анимационный ролик). Всего предлагается два тура. После окончания второго тура, на месте картинки с автором - синее поле, в нижнем темно-сером поле три надписи : "ИГРА ОКОНЧЕНА" , "result: x " и "your time: xxxx" . Результат - число правильных ответов, время - затраченное на ответы в миллисекундах. Если вы угадали оба раза, то в синем поле возникают текстовые поля и кнопка. После ввода ваших анкетных данных и нажатия кнопки, игра генерирует их код и предлагает отправить нам этот код. Отправьте этот код по адресу twtwt@mail.ru , и наши Шахиды тут же доставят вам ващ выигрыш :) ... Игра прокручивается один раз (вам дана только одна жизнь), если обновлять вэб-страницу, то можно перегрузить ресурсы вашей системы мусором Явы виртуальной машины, поэтому делайте рефреш этой страницы(для перезапуска игры) не более пяти-шести раз. Игра написана под впечатлением оригинальности мышления разработчика спецоперации. Все никак не собирусь перерисовать картинку - многоэтажный домик заменить на Кремль или особняк Путина , а может и рисовать не придется, сканирование фотографий чуть попроще... ----------------------------------- Немного восхищения и удивления гением Роберта Шекли. 1. Его рассказ "Страж-птица", по форме, предвосхитил(предсказал,предугадал) сегоднешнее и завтрашнее. 2. А его повесть "Билет на планету Транай" полностью(то есть по-существу), среди прочего, раскрыла проблему больших начальников,правителей и будущей обратной связи их с простым людом. Главная нынешняя русская скотина - Владимир Владимирович Путин, - это русская гэбнюковская свинья с ощейником, а чечены, - это те самые голосователи... :) (разумеется, что наш "АМДП "Шахид-1" прекрасно укладывается в паззл :), а мы в этой схемке кто? :) ). Хотя, пожалуй, картина получается еще красочнее, с учетом обычая кровной мести... Чечены пристрелили некую Патрушеву, не получилось взять в заложники... :)... Помню, как мы(вы) усыкались с ехидных проговорок Венедиктова "а что это он своих дочерей прячет ?..." :)))))) ... ----------------------------------- А вот прикольно-гинекологическо-генитальное обобщение с уморительного рассказа о бездельнике-технаре, которому было лень открывать бутылки с пивом. Он сварганил робота для открывания пивных бутылок... :) , хе-хе... потом этот робот вскрыл пизду Путинской дочери или отрезал её папаше яйца (программист указал в программе, что у волосатой бутылки нужно отсекать горлышко... :) ) . Фу-у-у, какая пошлая иллюстрация проблемы изделий двойного назначения... :) (в вышеуказанном модельном примере, предполагается некая выпуклость лобка влагалища госпожи(в девичестве) Путиной...) ----------------------------------- Немного, полушутливых рассуждений. 1. Любому образованному человеку известна тысячелетняя статистика(а она, как известно, знает все) - наиболее рентабельные виды бизнеса: проституция, работорговля, наркобизнес, производство_и_продажа_вооружений_и_боеприпасов. Предположим, какой-нибудь инженер, желает сварганить маленький заводик производящий какую-нибудь востребованную на розничном рынке хуйню: какие-то особо теплоизолирующие кирпичи, особо прочные и износостойкие гандоны, никогда не воняющие носки(уже изобретены такие) и т.д. Этот инженер обнаружит, что нужны капиталовложения(возможно даже в основные фонды), которые начинаются от десяти тысяч долларов, если же браться всеръез, то нужно застраховать свой бизнес и тогда начальные затраты превысят сто тысяч долларов. При этом, производственный процесс будет тупым,тоскливым и нудным, от которого инженер быстро отупеет до уровня полутрезвого электрика, который дрочит шкаф управления станка, пытаясь найти сбоящую релюшку... :(((( Моя идея(в техническом аспекте) - намного современнее,актуальнее и интереснее, чем вышеизложенный типовой стандартный бизнес-проект ! А поскольку производимое изделие относится к почти вооружениям, то моя(наша) деятельность будет являться, при этом, и сверхрентабельной!!! и одновременно абсолютно легальной !!! Ёлки-палки, нам удалось воплотить мечту инженера Гарина(в смысле хай-тек) и Остапа Бендера(в смысле легальный фактический криминал) !!! Это как делать пулемёты и продавать их на базаре, не опасаясь ни ментов ни гэбнюков !!! 2. Если посмотреть на кучу моих дурацких прошений местным начальствующим чучмекам, то возникает вопрос, неужели количество не переходит в качество ? :) Интересно, какому-нибудь местному чурке-башкарме будет хотя бы порицание/поощрение за делание/не_делание по поводу нашего изделия ? Мне всегда смешно видеть, как местные чучмеки с захватывающим восхищением смотрят какой-нибудь баэвык с бэспылотныкэм... :)))) 3. Забавно будет видеть цвет лысины Путина В.В. , когда гэбнюки ему доложат о распылении пыли с изотопом кобальта над олимпийскими объектами Сочи... :))) Падлой буду, ящик конъяка за фотку... (лысины)... а вы о чем подумали? В смысле мне нах не нужны аэрофотоснимки Сочи,... пока... :))) 4. Янки подкидывают бабло местным чучмекам, что те караулили местный и привозной опий и анашу - чтобы хоть как-то сдерживать Афганию с ее талыпами и моджахэддинами. То есть янки досыта кормят и тепло одевают местных чучмеков(пограничников,ментов,гэбнюков,башкарму), чтобы те, как сторожевые собаки ходили с автоматами вдоль границы. При этом, янки боятся давать местным чучмекам что-то сложнее, чем миномет или БТР, так как знают, что : - во-первых, чучмеки не смогут использовать современную военную технику; - во-вторых, чучмеки постараются спиздить и продать. в начало страницы
в начало страницы
11. ОЧЕРЕДНЫЕ ЗАДАЧИ И ТЕКУЩИЕ ПЛАНЫ 11.1. ПРЕАМБУЛА Сначала немного хроники. В 2007 году, меня замучили русские скоты на "Дастане". Кое-чем мне удалось им отомстить. Я написал донос (проинформировал) индусов, о том, что русские скоты морочат им голову. Русское жулье продавало им торпеды СЭТ-65 и все вспомогательное оборудование(КРС- контрольно- -регулировочные стенды). Сами торпеды (железо) они скупали с арсенала в бухте Балаклава, на заводе "Дастан" (бывшие физприборы) они делали Головные Отсеки (ГО). В Головном Отсеке торпеды располагается почти вся электронная аппаратура (система самонаведения и т.д.) . Система самонаведения активно-пассивная, т.е. используется и активное зондирование цели бортовым гидролокатором, и пассивное самонаведение по гидроакустическим шумам подводной лодки. Метод самонаведения (пеленгации) - фазовый, т.е. для определения пеленга на цель используется разность фаз в четырех акустических приемниках, установленных поперек оси торпеды. Электронная аппаратура Головного Отсека выполнялась на элементной базе СИС(интегральные микросхемы средней степени интеграции) - в основном серии 564(логика),140(аналоговые дела). Так вот, русские скоты использовали просроченные ИМС, ЭРЭ и даже паяли микросхемы выпаяенные с других плат. У индусов, на военной приемке, был какой-то адмирал, который само-собой разумеется ничего не понимал в технологии производства печатных узлов - печатных плат со смонтированными пайкой на них ИМС и ЭРЭ. Я информировал об этом индийское консульство в Бишкеке. Также, мне удалось узнать, что индусы собираются закупать модернизированную торпеду СЭТ-65. Модернизация торпеды, в основном, заключалась в усовершенствовании Головного Отсека. За основу, брался Головной Отсек "Керамика", в котором была реализована аналоговая обработка принимаемых гидроакустических сигналов (зондирующий гидроакустический сигнал - сигнал с линейной частотной модуляцией - для расширения спектра - для последующего повышения эффективности фильтрации от помех, а основная помеха - реверберация). Новый ГО имел шифр "Керамика модернизированная". В "Керамике модернизированной" использовалась цифровая обработка принимаемых гидроакустических сигналов. Вся цифровая обработка выполнялась программно - - бортовой микроЭВМ (ее называли микропроцессорное управляющее устройство) , которая была реализована на СБИС ADSP-2191 (ADSP-2191 - это однокристальная ЭВМ класса DSP). Так вот, исходник программного обеспечения на эту микроЭВМ был создан в НПП "Редан", и этот исходник не передавался на завод, и не передавался индусам(конечным покупателям). Чипы(СБИС) поступали на завод уже с прошитыми в них софтом, и разумеется, что считать даже объектный код было невозможно. Это было очень опасно для индусов, так как управляющая программа могла содержать секретные коды ИКМ-модуляции, при получении которых бортовая микроЭВМ торпеды начинала бы уводить торпеду в сторону от цели, или даже направлять торпеду в обратную сторону(на точку пуска). В свою очередь, секретные коды излучались бы гидролокатором атакуемой подводной лодки(например пакистанской). И об этом я информировал индийское консульство в Бишкеке, а заодно сообщил в посольства США, ФРГ, КНР, РФ. Что произошло дальше, в недрах министерства обороны Индии, я не знаю, но спустя два-три месяца произошел довольно громкий скандал с морскими вооружениями, которые русские модернизировали для индусов. У индусов была(и есть) противолодочная система "Морской Змей", которую они закупали еще в СССР. Система "Морской Змей" состоит из потиволодочного самолета Ил-38(военная версия самолета Ил-18), на этом самолете есть много всякой радиоэлектронной аппаратуры(в основном различные РЛС и радиостанции) и этот самолет несет глубинные бомбы, противолодочные торпеды, гидроакустические радиобуи. Самолет разбрасывает эти гидроакустические радиобуи, потом принимает предварительно обработанную гидроакустическую информацию с них (по радиоканалам), делает дальнейшую обработку инфы, его ЭВМ по определенным алгоритмам пытается выявить спрятавшуюся(или убегающую) субмарину, и затем закидывает предполагаемый район нахождения подлодки глубинными бомбами и противолодочными торпедами. Примерно так работает эта система. Русские провели модернизацию двух комплексов (двух экземпляров системы) и получили за это, от индусов, несколько десятков миллионов долларов. Затем они модернизировали еще два или три комплекса, и тут индусы вдруг ни с того ни с сего отказались принимать выполненную работу и заявили, что выявили какой-то брак (что явный нонсенс, так как предыдущие два комплекса были приняты ими без претензий, а ведь любой инженер знает, что брак в работе намного более вероятен в первых экземплярах серии). Вероятно, мое письмо дошло до соответствующих органов Индии, и там провели проверку, и прогнали бездельников и коррупционеров из соответствующего департамента министерства обороны Индии, и новые сотрудники выявили массовый брак и очковтирательство русского жулья (русские известны своей коррупционностью - взяткодательством). В пользу моей догадки, я провел примерные оценочные расчеты корреляции двух событий (моего доноса и скандала с "Морским Змеем"), с учетом предшествующего полувекового беспроблемного сотрудничества индийских ВМС с советскими(российскими) производителями морских вооружений. Как видим, в какой-то мере, мне удалось отомстить, хотя ничего материального за это я не получил (только потратил немного времени) . Потом, поразмыслив и вспомнив о печальной судьбе Сутягина, Данилова и других, я решил для страховки закосить под придурка (в "Золотом Телёнке" понятно описана мотивация, другая мотивация была у таких героев, как Камо, а намного раньше него - Томазо Кампанелла - автор утопии "Город Солнца") . Возможно, я перестраховался, а возможно наоборот я смог упредить неприятности . С одной стороны, здешняя башкарма и гэбня - стадо продажных ишаков и среди всеобщего бардака нет смысла опасаться умников . С другой стороны, Сутягин не имел даже третьей группы допуска к секретной информации (он публиковал и продавал информацию, которую раскапывал в Интернете, а также, имея блестящую квалификацию физика-исследователя, он проводил анализ и сопоставление открытой информации, в том числе, полученной от офицеров-подводников), но гэбня всё равно закатала его в тюрягу на пятнадцать лет, а у меня как ни крути была подписка по третьей группе... Трагическая участь молодого человека по имени Александр Долматов доказывает, что шутить с гэбнёй опасно, с ней надо всегда махаться по взрослому, ведь гэбня, это по сути те же урки, только более гламурные... Ещё раз напоминаю мудрое изречение : "С кем поведёшься, от того и наберёшься"(c) ... Или как говорится, типа : "Если будешь чистить говно, то забудь про парфюм" ... (моё авторство :) ) ... В общем, по гамбургскому счёту, я проиграл немного. Быть гэбнюком или ментом, или башкармой мне никогда не хотелось, в космонавты мне уже поздно :) (в школьные годы мечтал о полётах к звёздам... :) ) . А работать инженером или техником по электронике и софтвэру можно с любой инвалидностью... (лишь бы в башке были знания и башка варила)... Мне всегда прикольно наблюдать за ментами,гэбнюками,башкармой - эта публика, как правило, тупая,наглая и притом хитро_ебучая... :) такой вот парадокс... хотя, если вспомнить афоризм Альберта Эйнштейна : "Природа хитра, но не злонамерена"(с) , то становится понятной картина... ... Разумеется, что я информировал местных гэбнюков(УВКР ГКНБ КР - Маралбаев,Бакердинов). Но это было бессмысленное занятие - с таким же успехом я мог бы доказывать теорему косинусов стае обезьян. Местные чучмеки и не могут, и не хотят. Не могут, потому что нету квалифицированного инженера среди них (любой чучмек лезет в начальники, а потом какой с него инженер). Не хотят, потому что какой прок с меня ? Индусы им копейки не заплатят. И к тому же у местных чучмеков есть какой-то благовейный ужас пополам с восхищением перед "русскими гениями". Например, сейчас на троне сидит очередная чурка - Атамбаев. Атамбаев научился (точнее турки подсказали) как делать автомобильные аккумуляторы из свинцового припоя. Автомобильные аккумуляторы - свинцово кислотные. В производстве автомобильных радиаторов используется много пайки свинцовым припоем. Новый верховный чурка - Атамбаев, был директором АО "Автомашрадиатор" и одновременно клепал совместно с турками автомобильные аккумуляторы. И при этом хвастал, о том какой он производственник :). Во время последних выборов кланялся русским на том же Дастане, а может хуй у них сосал ? :) Теперь вот поехал в Москву пососать у Путина, может тот ему даст...(горку назвал зря что ли ? :) ) Хотя вряд ли Путин ему даст пососать, ведь скорее всего здесь грядет очередная народная революция(с), ведь другие здешние чучмеки тоже хотят посидеть на троне. Весьма вероятно, что при физах была и есть шайка-лейка, в которой состояли Табалдиев, Даминов, и ихнии компаньоны в Питере, Киеве, Алмате и также контора под смачным названием "Корпорация Морские Вооружения"(из Питера). Эта шайка-лейка скупала бэушные торпеды, в основном с арсенала в Балаклавской бухте(она под Севастополем). Современные торпеды(как и подавляющее большинство более-менее сложных технических объектов) конструируются по модульному принципу, поэтому многие их узлы полностью или частично взаимозаменяемы. На физах они проводили дефектовку и перекомплектовку, что-то заказывали в Алмате на заводе Кирова, потом пересобранную хуйню спихивали(в основном) индусам. Физы, при совке были монополистами в крупносерийном производстве самонаводящихся(а также дистанционноуправляемых) противолодочных торпед с электрическими движителями. Полигон возле Пржевальского был оснащён сравнительно современным оборудованием. Русские долго пытались захватить "Дастан", так как создавать у себя подобный производственно-полигонный комплекс - весьма накладно. Кстати, Бусурманкул Табалдиев - конкретный пидарас(подстилка под Сергеем Ивановым) он подставлял Кыргызстан перед индусами в негативном свете(очковтирателей и шулеров), но этот Табалдиев, вероятно, не сплавлял дерьмо русакам(те его конкретно купили), то есть этот Табалдиев - агент влияния русских скотов(гэбни). Но как это часто бывает, говно постепенно всплывает, и уже всплыла афера с питерской фирмой "Барс" и её директором Фицнером (Газета "Коммерсантъ", №37/П (5068), 04.03.2013 "Следствие оценило комплектующие к торпедам"), потом, возможно начнут копать и шайку-лейку Табалдиев-Даминов... История с этими пидарасами(Табалдиев,Даминов and corporation) конкретно доказывает, что корыстолюбивым,властолюбивым людям по барабану инженерное ремесло. Папаша Табалдиева был дешёвым пиарщиком, и по мнению его коллег был дерьмовым инженером, лез в начальники и депутаты в тандеме со своим корешом Нейманом(тот был конкретным сексотом гэбни). А его отпрыску насрать на баткенских,ошских,жалалабадских чабанов , которых собирались херачить хеллфайрами американские операторы, посасывая кока-колу в Неваде (см. вылизывание жопы американскому генералу Б.Табалдиевым от 2 апреля 2012 года)... Что касаемо лавров Джулиана Ассанжа, так они нам не очень интересны(морализаторство часто незаметно переходит в ханжество), но неприятно, когда пидарасная гэбня-башкарма типа Табалдиева в очередной раз мухлюет на жизнях тёмных,забитых людей... Впрочем, ничего нового не произошло, как обычно, там где : закрытость,секретность,келейность,ретроградство; то там же и : воровство,махинации,очковтирательство,дремучесть,казёнщина,уголовщина, показуха,мухлёж,пидарасизм,понты,каръеризм,лакейство,чинопочитание, бредовость,фаворитизм,подхалимаж,жополизание,жадность,начётничество, пуританизм,изворотливость,ханжество,дебилизм... в начало раздела 11.2. ПЛАН МЕРОПРИЯТИЙ С учетом набранного опыта, я решил действовать дальше. Содержимое предыдущего раздела(ПРЕАМБУЛЫ) является доказательством полушутливости нашей... В Интернете, есть бесплатный хостинг. Например, этот вэб-сайт располагается на хосте(серверном комплексе), который расположен далеко от Кыргызстана (вероятно в России). Этот хост обслуживается бригадой системных администраторов(системных программистов), хорошо знающих серверную хостовую программу "Апач"(бесплатная программа вэб-сервера, как правило под Юникс). Системный администратор всегда может изменить содержимое любой вэб-страницы(html-файла) и вооще любого файла хранящегося на хард-дисках хоста, и поэтому, содержимое этой страницы не имеет никакой юридической силы. Разумеется, эту вэб-страницу читает русская гэбня (мое сочуйствие :) ), и пытается заработать на очередную звездочку. При этом, русская гэбня испытывает смешанные чуйства :) , с одной стороны русские скоты презирают черножопых(то есть таких как я), с другой стороны побаиваются диких азиатов. Русская гэбня знает, что я знаю о том, что они знают... (у попа была собака...) :) . Это ровно ничего не значит. Ну и местная чучмечная гэбня, тоже присматривает(и вслушивается, жуя самсу)... (вот блин, куда идут гранты ... :) ). Сначала, я буду применять свой дрон в сугубо легальной сфере - в сельском хозяйстве. Доебаться до нас невозможно. Я надеюсь получить опыт эксплуатации дронов и приобрести по ходу дела практический опыт в области сверхлёгкой авиации. По ходу дела буду ебать мозги местной чучмечной шатии-братии, подкидывая им свои челобитные. Хотя, вспомнив, что знаменитый писатель-нобилиат Набоков как-то зло пошутил : "многим проще умереть на баррикаде за идею, чем выучить таблицу умножения"(с) - можно догадаться, что местные чучмеки десять раз вылижут задницу какой угодно импортной иносранке, но не захотят и не смогут даже начать пытаться спроектировать что-то сложнее, чем канализация сортира дачи верховной чучмечной башкармы. 11.3. ФОТО ПРОМЕЖУТОЧНЫХ ЭТАПОВ Здесь некоторые фотографии узлов изготавливаемого опытно-экспериментального экземпляра изделия, м комплектующих на него, сделанные в октябре 2012 года . ----------- Предварительно собранный каркаса дельтаплана(вместо стальных тросов, которые будут затем, используются технологические крепёжные верёвки) :
 . . . - . -- . . - . . - . . . -- . . - ... . - .
. . . - . -- . . - . . - . . . -- . . - ... . - .
 . . -- . . - . .. - . . -- . - ... . - .
. . -- . . - . .. - . . -- . - ... . - .
 . - .. . - . .-. . - - .. . . .. - .. .
-----------
Предварительно сшитый парус крыла дельтаплана(парус будет подгоняться
под каркас и возможно потребуется частичное перешивание) :
. - .. . - . .-. . - - .. . . .. - .. .
-----------
Предварительно сшитый парус крыла дельтаплана(парус будет подгоняться
под каркас и возможно потребуется частичное перешивание) :
 .. . .. . . .. . .. .
.. . .. . . .. . .. .
 . . . . . . .. .
. . . . . . .. .
 . . . .. .. . .. ... . . . .
. . . .. .. . .. ... . . . .
 .. . . . .... . . . ..
в начало раздела
-----------
Двигатель от мотоцикла "ИЖ-Планета", который будет дооборудоваться
затем необходимым(системой зажигания, электрогенератором и т.д.) :
.. . . . .... . . . ..
в начало раздела
-----------
Двигатель от мотоцикла "ИЖ-Планета", который будет дооборудоваться
затем необходимым(системой зажигания, электрогенератором и т.д.) :
 .... . .. . - . . . .. ... - . .
.... . .. . - . . . .. ... - . .
 . . . .. .. ..-. . .
-----------
Воздушный винт(пропеллер), который пока не балансировался :
. . . .. .. ..-. . .
-----------
Воздушный винт(пропеллер), который пока не балансировался :
 . . .. ... . . . . ...
. . .. ... . . . . ...
 . . ... . . . .
-----------
Модуль драйверов :
. . ... . . . .
-----------
Модуль драйверов :
 . . . .. . .. . .
. . . .. . .. . .
 . . . ... . . ..
. . . ... . . ..
 . .. - . - . . -- . . .- ... - .
[ПРДОЛЖЕНИЕ СЛЕДУЕТ]
в начало раздела
в начало страницы
. .. - . - . . -- . . .- ... - .
[ПРДОЛЖЕНИЕ СЛЕДУЕТ]
в начало раздела
в начало страницы